A few questions: Has anyone here used them before? If you know, how widely are they adopted in research and or industry? If you have worked with or is currently working with them, what kind of interface are you using? As for me, I'm currently using their X, AX, and MX series to build an autonomous mobile hexapedal manipulator robot for academic research and I'm interfacing them through an STM32 microcontroller running a bare-metal half-duplex UART driver for the servomotor I wrote myself. My specific application which requires an onboard and flexible microcontroller driver makes working with the official controller firmware rather tedious or unnatural, so that's why I wrote the driver from scratch per-protocol. Because of the problem, I'm interested on making my bare-metal driver portable by parameterizing the transport layer around per-protocol packet handler and builder code before eventually releasing them to the community under an open-source license. Do you think it's a worthwhile project? submitted by /u/Nusto1n1 [link] [Kommentare]
Channel
c/robotics
No description.
Owner @master · 177 posts · 1 joined · Status active · Posting permission: Every logged-in user can post

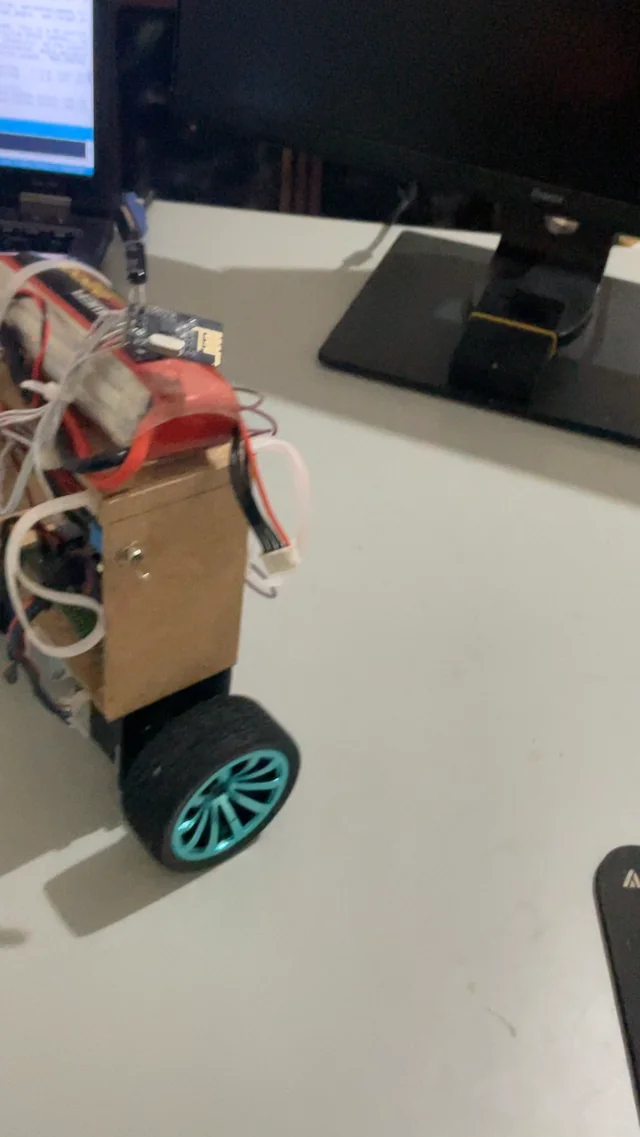
This is a self-balancing robot built around an ESP32. It uses two NEMA 17 stepper motors driven by DRV8825 drivers and an MPU6050 IMU. The biggest challenge was tuning the PID controller and filtering the IMU data for long-term stability. After a lot of tuning, it can now balance continuously—I even recorded it balancing for 45 minutes straight without falling. submitted by /u/mAbdelazim01 [link] [Kommentare]
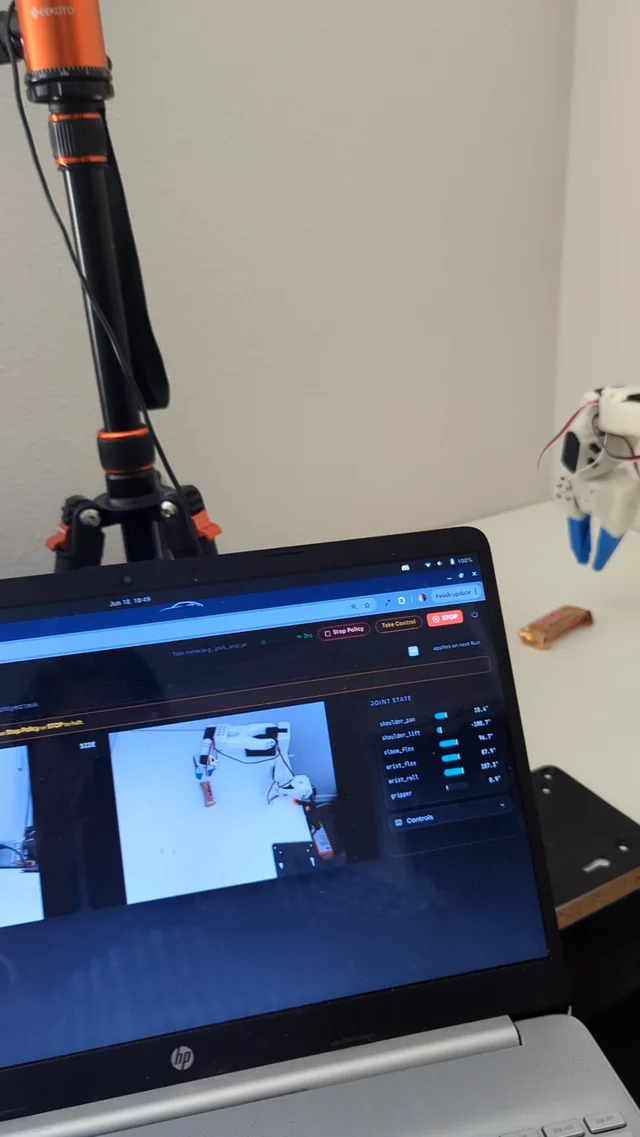
Curious, how many of you use solutions to remotely view what your robot is seeing, or in some scenarios even remotely monitoring/configuring your entire inference stack? This is my attempt of what that looks like. I am happy to provide early access for the community! submitted by /u/Logical-Present6320 [link] [Kommentare]

Learn more: https://www.realsenseai.com/press-release/at-automate-2026-realsense-unveils-the-d585-pro-and-perception-studio/ submitted by /u/Chemical-Hunter-5479 [link] [Kommentare]
I'm currently pursuing an M.Tech in Mechanical Engineering and have been considering a transition into Robotics. My exposure to robotics is limited to basic theoretical concepts like kinematics, and I don't have any hands-on robotics experience. For those already working in the field, is it worth making the switch at this stage? How challenging is it to break into robotics from a mechanical background, and what does the career growth look like? I'd appreciate any honest insights from people who have been through a similar journey. submitted by /u/sahil-wagle [link] [Kommentare]
So we're using an ESP32S with a TJA1050 transceiver and basically we're using this setup to operate a rover using ROS2 Humble and MAVLink commands, so it has a lot of modules like actuators, PDB, mini-arm, and etc connected through a CAN bus network. Now the issue is that we will be using multiple BLDCs for our rover's arm and these motors continuously send out updates (or heartbeats or sth) so using these BLDCs in the same network seems like the MCU will lag or slow down and just be downright ineffective. So is there any way to isolate the motors to a different network or CAN line? I was thinking of adding another MCU on top of the ESP32 to only handle the motors but is there an alternative to this approach, preferably one without adding more hardware? submitted by /u/Sadhya [link] [Kommentare]
I've been working on an open-source pet companion robot called OpenPaw, and wanted to share the navigation system I built for it. The hardware is an ESP32-S3 running ESP-IDF with a camera, DRV8833 motor driver, VL53L0X distance sensor, and MLX90634 temp sensor. It hosts its own WiFi AP — no cloud, no internet needed. The navigation works like this: I created virtual portals in my home using the Auki posemesh network (like GPS waypoints indoors). Each portal has X, Y, Z coordinates. A phone app built with Flutter connects to a local bridge API and loads these portals. When you scan a portal QR code with the phone's camera, the app records your position AND compass heading using the phone's magnetometer. This gives the robot both location and orientation — the two things needed for autonomous movement. The robot runs a PWM-based odometry task that estimates its position from motor commands every 50ms. A /api/pose endpoint returns real-time X, Y, and heading. A /api/trajectory endpoint logs the full path. The app shows all this on a 2D map overlay with portal markers, the robot's position, heading arrow, and traveled path updating every 500ms. The portal dropdown on the control screen lets you select any destination. The app calculates direction and distance from the robot's current position to the target in real time. The entire stack — ESP-IDF firmware, Flutter app, Auki bridge API — is open source. Build guide and schematics are documented. What navigation approaches have you used for indoor robots without GPS? I'm planning to add wheel encoders next for better accuracy. submitted by /u/Single_Gas_3063 [link] [Kommentare]

From Genesis AI on 𝕏: https://x.com/gs_ai_/status/2066869851659121128 Website: https://www.genesis.ai/ submitted by /u/Nunki08 [link] [Kommentare]
So I've been trying to add some modification to my Unitree Go2 robot and I've tried every WebRTC techniques in the internet available. But I never could connect to the robot Using WebRTC. I've tried to use SDK2 for mod but SDK only Works via ethernet. I've also tried to do sudo update and Rosbridge installation via ssh but its always 0% for some weird reason. But It pings other sites like google.com just fine. How can I get this headache solved? submitted by /u/Big_Sample9338 [link] [Kommentare]
Hi everyone, Has anyone here reviewed or submitted a paper through the ICRA/IROS transfer review process? I submitted through the transfer option for IROS and was rejected, so I’m trying to better understand how the process works. What can reviewers see: the previous reviews, only the author response/revision summary, or something else? For those with experience, did the transfer process feel helpful, or could it bias reviewers since they know the paper was previously rejected? Any insights from the reviewer or author side would be appreciated. submitted by /u/nikolaskagia [link] [Kommentare]
I hope this is the right place for this post. This idea doesn’t seem far-fetched or futuristic to me - I believe it’s technically achievable today. Mods, please let me know if this belongs elsewhere I want to suggest a home robot for daily life missions. The purpose of this robot is to help people with everyday tasks at home - cooking, cleaning, and everything in between - at an affordable price. Principle Architecture: The robot is wheeled (not humanoid) and controlled by an LLM. Instead of human-like arms, it uses swappable tools. Each tool is designed for a specific task. The LLM controls the robot through 3 protocols only: API commands - the LLM tells the robot what to do Shared map - the robot maps the house in 2-3 hours on first setup. Both the robot and the LLM share the exact same map Visual images - the robot sends photos to the LLM, the LLM sees what is happening and makes decisions The Tools: Each tool contains its own API and README file. When the robot connects a tool, the LLM reads the README and immediately knows how to use it - like installing an app. Examples: egg breaker, dish washer, floor cleaner. Each tool costs ~$50. A whole ecosystem of tools can be built around this robot. The base unit has iRobot-style floor cleaning built in. Example: Making an Omelette The user says to the robot: ‘Please make me an omelette.’ The LLM understands the request and breaks it down into steps: The LLM checks the map and locates the kitchen The robot navigates to the kitchen The LLM sends a command: connect the egg-breaking tool The robot takes a photo of the refrigerator area - the LLM sees the photo and says: ‘open the fridge, the eggs are on shelf 2’ The robot takes the eggs The egg-breaking tool breaks the eggs into the pan The robot connects the cooking tool The LLM monitors the cooking via photos in real time The omelette is ready All of this happens automatically, with no human involvement. Target price: ~$2,000 for the robot, ~$50 per tool. This idea is free for anyone who wants to build it. Good luck! submitted by /u/Narrow-Necessary-947 [link] [Kommentare]