Channels

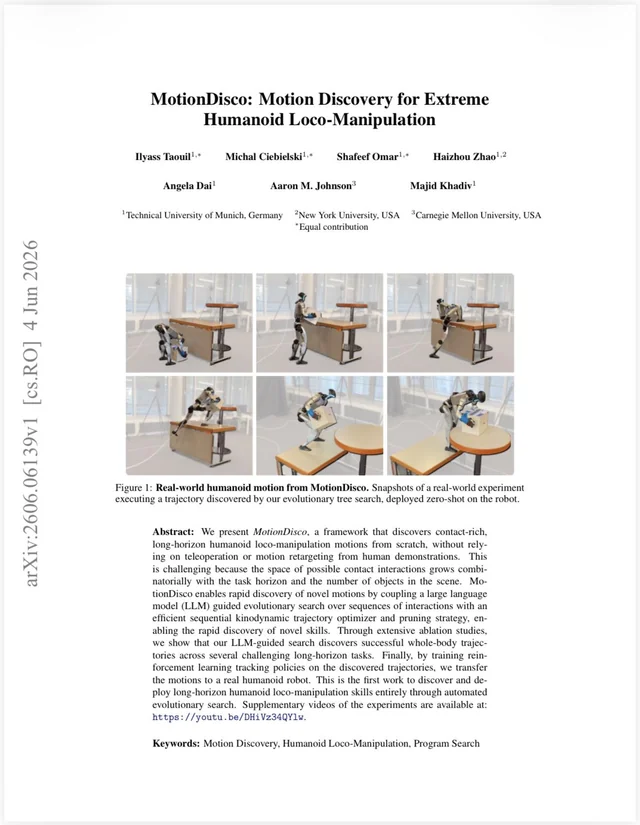
https://arxiv.org/abs/2606.06139 https://youtu.be/DHiVz34QYlw We present MotionDisco, a framework that discovers contact-rich, long-horizon humanoid loco-manipulation motions from scratch, without relying on teleoperation or motion retargeting from human demonstrations. This is challenging because the space of possible contact interactions grows combinatorially with the task horizon and the number of objects in the scene. submitted by /u/Worldly_Evidence9113 [link] [Kommentare]
Think like everyone else. Think like no one else. A daily social prediction game.
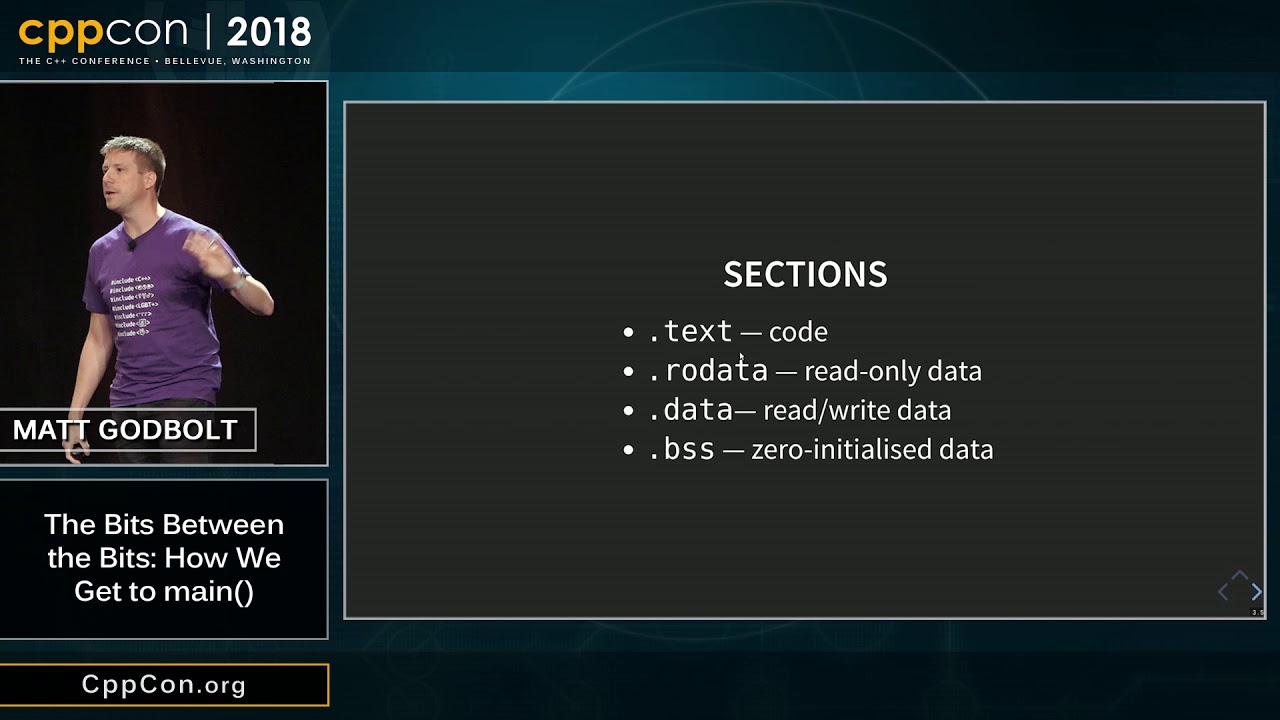
I thought of a cute problem: what is the smallest (size) ./a.out binary I can create? Here are some rules the program should follow: ./a.out must run successfully. $? must deterministically be 0. The binary must be produced by GCC only; no post-processing with objcopy, hex editors, or manual patching. We begin with the simplest program possible: // compiled with gcc empty.c int main() { return 0; } This gives us a file size of 15816 bytes (from stat). Not too shabby, but we will need four of the RAM used in the Apollo guidance computer to fit our binary that does nothing.

Don't get your hopes up.
We have 50,000 registered participants in SSoC 2026. Three hundred projects. Five thousand mentors. The most impactful engineering work we did this season? A hidden admin dashboard that no participant will ever see.
You have seen the posts. The LinkedIn announcement that opens "In a world where", four hundred words long and not one of them the author's. The comment that thanks you for "this incredibly thoughtful piece" and then describes a piece you did not write. The company email so completely handed over to a machine, start to finish, that no human could have read it back without wincing, which is the tell, because plainly no human did. Bad work is not the part that gets to me. Bad work has always been with us. It is that nobody making it appears to feel a thing. Not a wince, not a flicker.
Version Control, Auditability & Compliance for AI Agents
How Stack Overflow accidentally built the perfect dataset for teaching AI to code — and then trained its own replacement. Interactive, sourced, hands-on.

Hello, I am a 19-year-old dropout developing robots. I started with servo motors and have finally built a quadruped robot using the BLDC + FOC method. I have adopted a 20:1 backdriving reduction system. Currently, I am printing with PLA for testing purposes, and I plan to build it later using Pa12 or a more reinforced material. Also, are there any companies interested in spon1soring me? My development 💸 have run low😢😢, Please feel free to message me! My IG: IMAKEROBOTS__ submitted by /u/p0tato___ [link] [Kommentare]
I work as a surgical positioning specialist in an OR. Every day, my job is to make sure patients are positioned correctly during surgery. Wrong positioning = nerve damage, pressure necrosis, joint stress. Even then – the human body can compensate. It regenerates blood flow, heals tissue, adapts. A household robot can’t do any of that. Think about it like a motorcycle or a car: • Store your bike wrong over winter → flat tires, dry seals, dead battery • Wrong tire pressure for months → uneven wear, handling issues • A robot stored or „parked” incorrectly → joint stress, cable fatigue, sensor drift, premature wear Household robots like NEO, Tesla Optimus or LG CLOiD are coming to our homes within the next 2–3 years. They’ll cost $10,000–$20,000+. Nobody is talking about how to store, position and maintain them correctly at home. That’s the gap I’m here to fill – applying 2+ years of OR knowledge to household robotics. Question for the community: Would you trust a $20,000 robot to just „stand in the corner” without thinking about positioning and wear? submitted by /u/Commercial_Towel_352 [link] [Kommentare]
Peptide companies have been doing AI-engine optimization by spamming the biohackers subreddit to manipulate ChatGPT and Google.

Learn how to stay resilient in a difficult job with poor management, shift work, low morale, or constant stress. Seven practical, science-informed strategies to protect your wellbeing, motivation, and sense of control.