Channels
Coding the 1969 Paper 'Gaussian Elimination is not Optimal' to Capture Strassen's Original Insight

WhatsApp disrupted spear phishing attempts, asks court to hold NSO in contempt.
Generative AI is rapidly undermining the reliability of traditional hiring signals, making it easier for candidates to manufacture polished résumés and perform convincingly in remote interviews with real-time assistance tools. Interviews with 120 talent-acquisition leaders and an analysis of more than 6,000 screening sessions show that companies now risk selecting for candidates who are best at navigating the hiring process rather than best equipped to do the job. To adapt, organizations must redesign early-stage hiring around authentic reasoning, judgment, and adaptability instead of static credentials and scripted interviews.
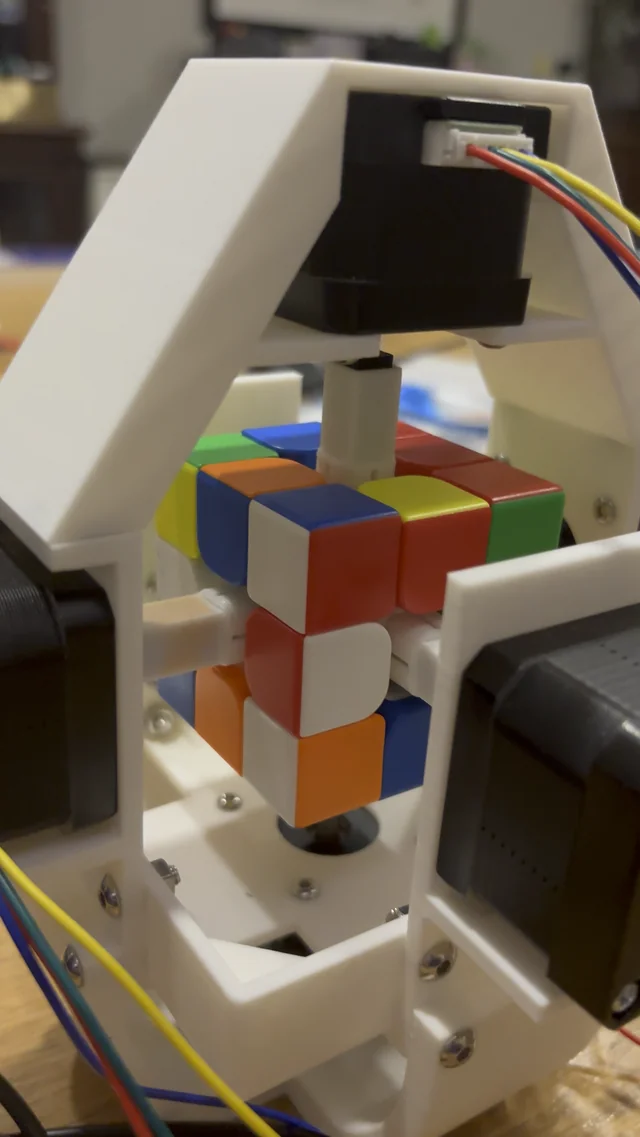
This machine takes around four seconds for each solve. To reach that speed I had to use the kociemba algorithm, which can find a solution of around 20 moves for all scrambles. It took me a really long time to complete this so I would appreciate it if you show it some love! I made this when I was around 15. Please ask questions! submitted by /u/Henry517 [link] [Kommentare]
TL;DR struggling in finding a meaningful research contribution on top of existing big foundation models. (edit: please note it's my first post on reddit,I'm not a bot) Context: I'm working on FM applied to robotics: VLAs, world models, WAMs. Lately I'm mostly reading papers, and implementing small adds on. Those topic are really exiting but I’m wondering where modest researchers (like me) can make meaningful contributions, given that training competitive foundation models from scratch is a big-lab game. For people working on fondation models in academy and R&D, that asked themself similar questions: Do you have some honest suggestions or feedback? If starting from a pretrained fondation model, main things that come to my mind are eg: - architecture changes (don't you lose all the pre training warmup)? - fine tune (not much new science if one runs lora...) - froze the model and build add-on like uncertaintyquant , world-model lookahead, inference guidance, safety constraints - something big I'm not seeing? Also happy to hear paper/project recommendations that are good examples of this. Thank you all. submitted by /u/Amazing-Coat5160 [link] [Kommentare]

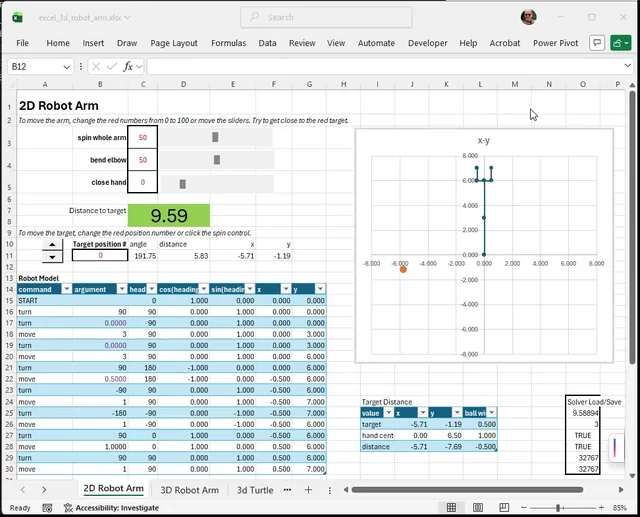
I made a playable Excel workbook that models a 2D and 3D robot arm using only ordinary spreadsheet formulas, charts, sliders, and Excel Solver. The idea is to make kinematics easier to understand. GitHub: https://github.com/CarlKCarlK/excel-3d-robot-arm The 3D arm is inspired by the old Radio Shack / TOMY Armatron toy robot arm. The workbook lets you move the arm manually, set a target point, and then use Excel's Solver to find the control settings that move the hand to the target (inverse kinematics!). I made this mostly as a learning project. Excel makes the math visible: the rotation matrices, position updates, target error, and Solver setup are all inspectable cell by cell. Nothing is hidden in a robotics library or graphics engine. The model itself is just a series of rows, each controlling one segment. The rows process 3 ways to turn (yaw, pitch, roll) or a move, turtle graphics-style. submitted by /u/carlk22 [link] [Kommentare]

Hey reddit, So we built a gaming accessibility app SensePilot that enable people with disabilities to control a computer and play video games. I just finished developing the human-robot interface prototype so thought I'll share the demo here too as its related to robotics. Hope to eventually apply this to assistive living robots, because their controls are usually very limited and their users are unable to use hands for controlling the robot very well. submitted by /u/SensePilot [link] [Kommentare]
I'm looking to buy a robot arm through AIFITLAB - has anyone done a major purchase through them recently? I'm looking to buy an AgileX NERO, price seems lower than US based companies which I know might be due to tariffs submitted by /u/Vassaci [link] [Kommentare]

undefined
guestlist returns tier ratings (green/yellow/orange/red) for whether AI agents and computer-use agents can access any website. Free Python library + API.
Fujifilm X-mount lens database. 169 lenses across 10 brands. Normalized specs, cross-brand comparison.