 R
↗
R
↗
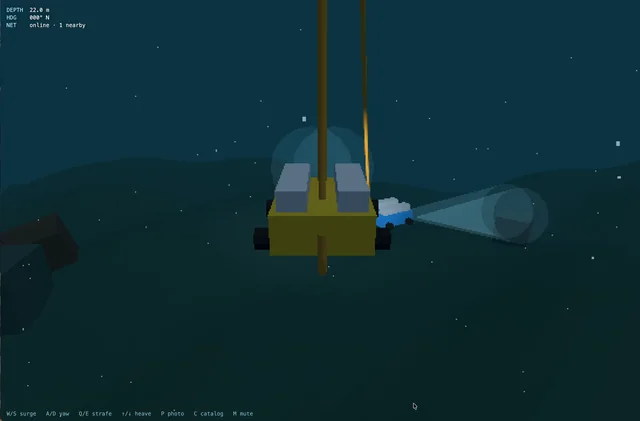
I made a little online multiplayer game inspired by my recent underwater robotics work. You can pilot a little ROV around the ocean, explore shipwrecks, take photos and categorize fish and things. It's multiplayer and I'm thinking of having treasure hunts, etc. Should I ship it? Would you play? submitted by /u/cheese_birder [link] [Kommentare]
R
↗
I have known sence I was 7 that I have wanted to be a robotic engineer and now it is the summer going into high school and I am already taking as many electives next year but I need to know if there is anything I should do over the summer to help me submitted by /u/GameFoxx1 [link] [Kommentare]
 R
↗
R
↗
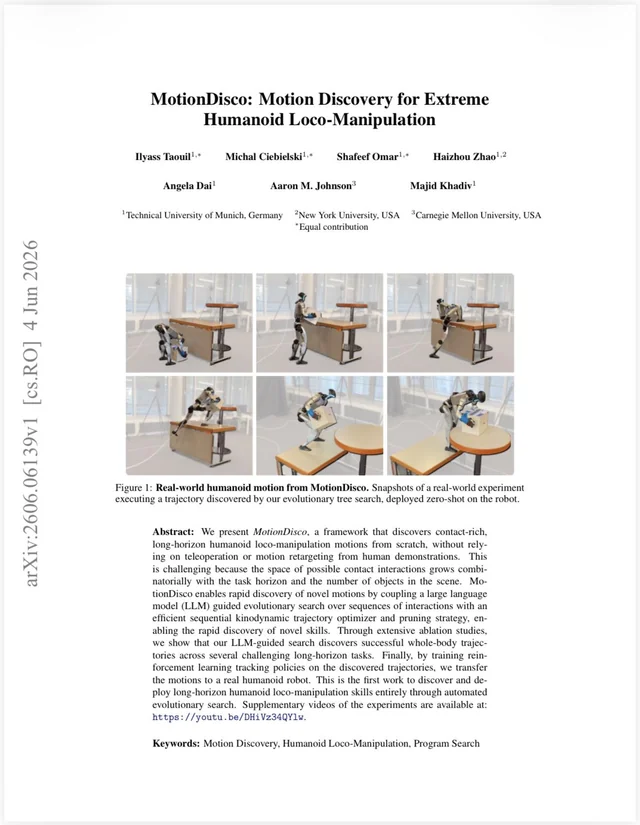
https://arxiv.org/abs/2606.06139 https://youtu.be/DHiVz34QYlw We present MotionDisco, a framework that discovers contact-rich, long-horizon humanoid loco-manipulation motions from scratch, without relying on teleoperation or motion retargeting from human demonstrations. This is challenging because the space of possible contact interactions grows combinatorially with the task horizon and the number of objects in the scene. submitted by /u/Worldly_Evidence9113 [link] [Kommentare]
 R
↗
R
↗
Hello, I am a 19-year-old dropout developing robots. I started with servo motors and have finally built a quadruped robot using the BLDC + FOC method. I have adopted a 20:1 backdriving reduction system. Currently, I am printing with PLA for testing purposes, and I plan to build it later using Pa12 or a more reinforced material. Also, are there any companies interested in spon1soring me? My development 💸 have run low😢😢, Please feel free to message me! My IG: IMAKEROBOTS__ submitted by /u/p0tato___ [link] [Kommentare]
R
↗
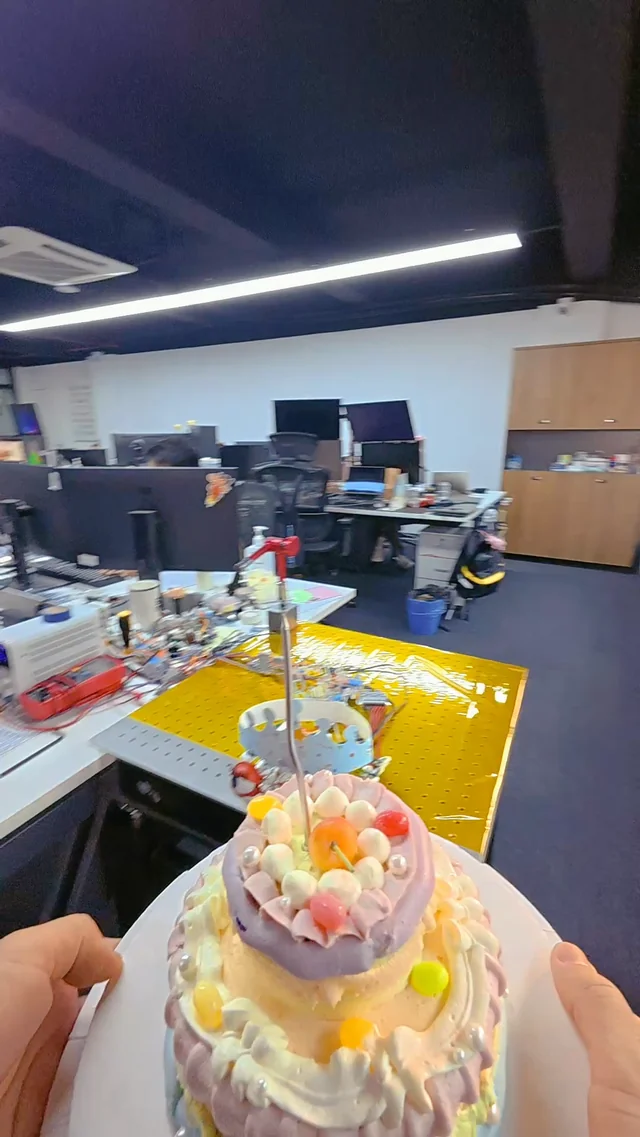
I work as a surgical positioning specialist in an OR. Every day, my job is to make sure patients are positioned correctly during surgery. Wrong positioning = nerve damage, pressure necrosis, joint stress. Even then – the human body can compensate. It regenerates blood flow, heals tissue, adapts. A household robot can’t do any of that. Think about it like a motorcycle or a car: • Store your bike wrong over winter → flat tires, dry seals, dead battery • Wrong tire pressure for months → uneven wear, handling issues • A robot stored or „parked” incorrectly → joint stress, cable fatigue, sensor drift, premature wear Household robots like NEO, Tesla Optimus or LG CLOiD are coming to our homes within the next 2–3 years. They’ll cost $10,000–$20,000+. Nobody is talking about how to store, position and maintain them correctly at home. That’s the gap I’m here to fill – applying 2+ years of OR knowledge to household robotics. Question for the community: Would you trust a $20,000 robot to just „stand in the corner” without thinking about positioning and wear? submitted by /u/Commercial_Towel_352 [link] [Kommentare]
 R
↗
R
↗
Another week of robotics marketing loops versus harsh field realities. In this week's breakdown, we are looking past investor decks to audit the actual friction of automating physical labor. Here is what we are covering in this episode: Figure’s 55/Week Ramp-Up: Production is accelerating, but commercial use cases are still in continuous development. Is scaling ahead of general application a massive capital gamble, or does their package-sorting livestream prove they're ready for structured work? Verobotics at NVIDIA Campus: A massive 100,000 sq ft facade deployment that ended up in a strict 60/40 operational compromise with human window washing crews because of live construction site dust. The 8.1B Parameter Bottleneck: Looking at RLWRLD’s new RLDX-1 model. Why graph optimization and real-time memory bandwidth constraints—not raw compute power—are the real bottlenecks for dexterous robotic hands. Spot's Purely Visual Blind Spots: Boston Dynamics paired Spot with DeepMind’s Gemini 1.6. What a sideways-crushed soda can proves about semantic reasoning models running without tactile force integration. FANUC x Google: Industrial giants bringing physical AI to factory floors, but keeping implementation highly conservative. submitted by /u/ButterscotchTiny1114 [link] [Kommentare]
R
↗
Has anyone received IROS results? The results are supposed to be out next week but I see my submission status currently changed to undisclosed, which, as far as I know, this happens usually at the day of sending out the notification. Any idea? Did anyone get any notification? submitted by /u/Street_Night_4344 [link] [Kommentare]
 R
↗
R
↗
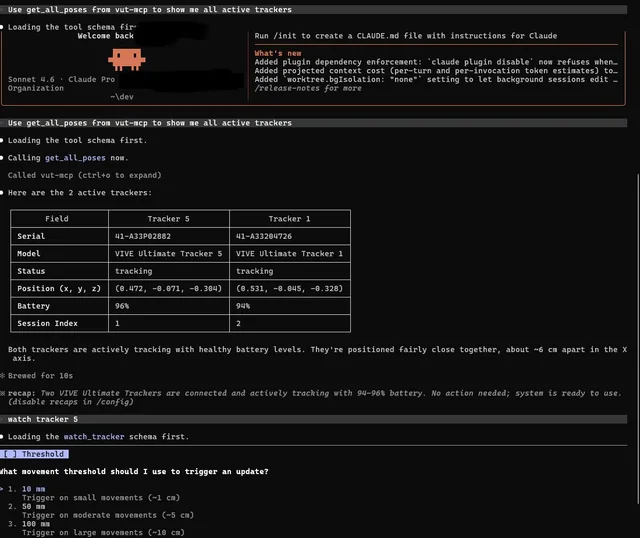
First-time poster here. I wanted to share a side project I’ve been working on that may be useful for robotics / research workflows. I built a headless toolkit for VIVE Trackers, which supports VIVE Tracker 3.0, Vive wands and VIVE Ultimate Trackers (SLAM). It streams live pose data over WebSocket, so tracker position / rotation can be used by other applications without needing a HMD. Tool kit also includes an MCP server, so the tracker data can be fed directly into agentic workflows / AI tools. GitHub: https://github.com/nandunabey/VT-Headless-SDK Disclaimer: I do work for VIVE, but this is not an official HTC / VIVE project. This is just a personal side project I built mainly to support a few research groups and to explore what’s possible. I come from more of a Product background than a developer background, so feedback, suggestions would be very welcome. submitted by /u/nadsblabla [link] [Kommentare]
 R
↗
R
↗
Been building Olaf, a companion robot, in the open for a while now and just closed out the phase focused entirely on making him expressive instead of just functional. Sharing the demo + what changed: Voice: swapped Cartesia for Google TTS — noticeably more expressive and natural. Head motion: tuned so movement tracks the words and tone of speech rather than firing randomly. Ears: redesigned the ear movement — surprisingly big impact on how readable his "mood" is. Heart: added a small display on the body that renders a beating heart. Multilingual: he can switch languages mid-conversation (in the demo he answers in Hindi). Still tuning the audio side. That's the expression engine done bar some fine-tuning. Next phase is the body — getting him mobile so he can move around the apartment. Everything's open source if you want to dig in. Would appreciate a star: Hardware: https://github.com/kamalkantsingh10/OLAF Voice agent / pipeline: https://github.com/kamalkantsingh10/olaf_companion Happy to answer anything about the build. Feedback very welcome — especially on the motion-to-speech syncing: right now I'm driving head/ear motion off the LLM output, and I'd love to hear how others have approached tying gesture to prosody. submitted by /u/KamalSingh10 [link] [Kommentare]