Channels

I would love feedback on the data quality and the 3D renderings specifically, because the renderings were the hardest part about getting this to work. Basically, Chaveta is a agentic dataset curation tool that allows you to submit a prompt and instantly receive a dataset for: - World models - Robotics (JSON Trajectories) - LLM Fine Tuning - Geological - Synthetic Tool Calling / LLM flows - Time series For the robotics path, you can also download to MCAP or simple JSON and we have a render tab that allows you to edit joints visually + we provide copy/paste scripts for importing the dataset into things like Transformers. Let me know what you think. submitted by /u/ComradePampers [link] [Kommentare]
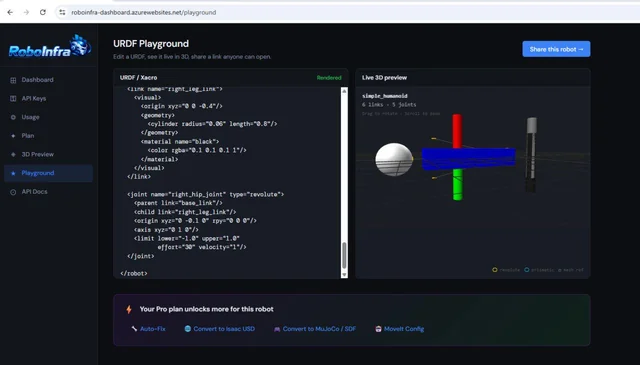
Hi everyone, I've been working on a browser-based URDF playground aimed at making robot development a bit easier. Steps: i) Paste URDF or Xacro directly into the browser ii) Instant 3D visualization iii) Shareable robot links iv) No ROS installation required Playground: https://roboinfra-dashboard.azurewebsites.net/playground Additional tooling: URDF/Xacro validation Auto-fix suggestions URDF → SDF conversion URDF → MJCF conversion URDF → USD conversion MoveIt configuration generation Mesh analysis GitHub Action integration Python SDK The goal is to make robotics workflows feel a little more like modern web development—open a browser, paste your robot description, and start iterating immediately. I'd really appreciate feedback from ROS, MoveIt, Isaac Sim, MuJoCo, and general robotics developers: What feature would make this genuinely useful in your workflow? What is currently missing from existing URDF tools? Any issues or suggestions after trying it? Thanks! submitted by /u/DateRealistic5066 [link] [Kommentare]
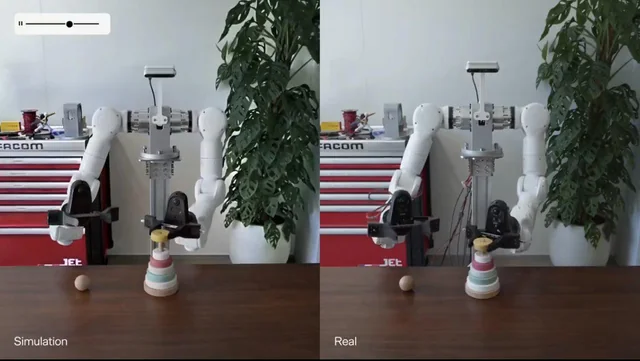
The Genesis sim video got me thinking: what does it actually take to build scenes like that (apart from gaussian splat part) with such accuracy, at scale? Asset and scene generation is one of the biggest bottlenecks in robot training. NVIDIA GR00T, Helix, HumanPlus, and ASAP all show the same pattern: more diverse scenarios lead to better sim-to-real transfer. But generating physically accurate objects and scenes takes time. Four platforms are working on this in 2026. Here's how they compare: 1. Rigyd: Agentic pipeline, best for on-demand scale and new types of objects Takes raw 3D (.glb, .fbx, .obj), images, or text and outputs calibrated OpenUSD + MJCF in ~2 minutes per asset with SimReady asset validator baked in. Generates full interactable scenes with per-object decomposition. Native Isaac Sim and MuJoCo support. Non-rigid and articulated objects are stated in the roadmap. The pipeline is agentic end-to-end, so no per-asset manual work. Good fit for teams that need to move fast with on-demand assets. 2. Lightwheel: High fidelity articulated objects, SimReady catalog Strong catalog of high-fidelity articulated assets and a SimReady library used by large enterprise customers. Per-asset visual and physical quality is high. USD and MJCF support via open-source converters. Good fit if you need a curated, validated catalog. Less flexible for new use cases or object categories outside their existing library. Catalog growth follows a curation model rather than an agentic pipeline. 3. NVIDIA Edify: Generative 3D, physics added separately Generates high-quality 3D meshes from text or image in under 2 minutes. Trained on licensed data, enterprise-safe. Tight Omniverse integration. The gap: it produces visual geometry, not SimReady assets. Physics, collision geometry, and USDPhysics schemas need to be added downstream before the asset is usable for robot training. Works well as an upstream step paired with a SimReady pipeline. 4. Moonlake: World modeling agent approach Acts directly inside Blender, automating the creation of articulated assets, physics-validated scenes, and complex environments rather than per-asset annotation. The approach is promising for research but production-grade Isaac Sim / MuJoCo integration is not there yet. If successful, world models could collapse scene generation and policy training into a single learning loop. What I think actually matters for sim-to-real transfer (ranked by impact): Per-object physics accuracy within the domain-randomization band Scene diversity (variation of scenes the policy sees during training) Visual fidelity (matters most for camera-only policies, less for contact-rich manipulation) How to choose: Need to scale across many object categories fast → Rigyd Need a validated catalog of articulated assets for known use cases → Lightwheel Need high-quality visual 3D in the NVIDIA ecosystem and will add physics downstream → Edify Researching end-to-end learned simulation → Moonlake For most teams the practical pattern is Rigyd for the long tail + hand-authored or Lightwheel assets for the few hero objects your scenario depends on. Both output standard OpenUSD/MJCF so they compose cleanly. Questions for the community: What's missing from this comparison? For those running training: where does asset prep actually bottleneck you? Image Credit: Genesis AI submitted by /u/yektabasak [link] [Kommentare]
We put together a robotics overview for business leaders, operators, procurement teams, investors, and executives who want to understand which robots are actually being deployed, which are still early, and where the industry is heading. The goal is not to make a technical ranking or a hype list. It is to explain the major categories of real-world robotics in a way that can be shared with people outside the robotics field. The overview covers: Boston Dynamics Spot — industrial inspection quadrupeds ANYbotics ANYmal — rugged inspection robots for energy, mining, chemicals, and heavy industry Agility Robotics Digit — logistics humanoids Figure 03 — general-purpose humanoids and embodied AI Boston Dynamics Atlas — all-electric humanoid mobility and manipulation Tesla Optimus — vertically integrated humanoid robotics strategy Unitree G1 — lower-cost humanoid research and education platform Universal Robots UR Series — collaborative robot arms for machine tending, packaging, assembly, and small manufacturers Amazon Proteus — autonomous mobile warehouse robots for logistics facilities Intuitive da Vinci 5 — surgical robotics and robotic-assisted surgery The main article is the general overview, and we are also building individual deep dives for each robot so non-technical readers can understand the business case, deployment maturity, pricing context, use cases, risks, and hardware/software stack behind each system. The audience is intentionally non-technical. It is meant to be something robotics professionals, engineers, founders, or operators can share with leadership teams, clients, or colleagues who need a grounded introduction without reading a robotics textbook. Disclosure: I’m affiliated with Black Scarab, where the article is published. The article is free to read and does not require signup. Most of the deep dives are already live. The Intuitive da Vinci 5 deep dive is still in progress and will complete the series. Full overview: https://www.blackscarab.ai/insights/top-10-robots-edge-ai-automation-humanoid-robotics submitted by /u/rgc4444 [link] [Kommentare]
Hey everyone, I'm deep into robotics simulation, specifically focusing on Reinforcement Learning (RL) and Deep Learning (DL) workflows. My hardware setup is an M4 MacBook Air (16GB unified memory). Initially, I wanted to use NVIDIA Isaac Sim/Isaac Lab because of its photorealistic graphics, advanced sensor simulation, and massive parallelized RL support. However, since Isaac Sim relies heavily on NVIDIA RTX hardware and CUDA, running it locally on Apple Silicon isn't feasible. I really want a local development environment rather than constantly relying on cloud instances. I need a simulation software that satisfies these core requirements: High-Quality Graphics: Clean rendering, realistic physics-based lighting, and solid sensor noise modeling for computer vision/DL perception models. Robust RL/DL Support: Seamless integration with Python ML ecosystems (like PyTorch, Stable-Baselines3, or JAX), OpenAI Gym/Gymnasium wrappers, and fast parallel simulation stepping. Apple Silicon friendly: Runs natively or optimized on macOS, making good use of the M4 chip and unified memory architecture without hitting x86_64 or CUDA bottlenecks. What are the best alternatives for this exact setup? I’ve looked into MuJoCo (especially with its native macOS build and the JAX-based MuJoCo XLA / MJX for acceleration, though I'm curious how well XLA handles Apple Silicon for parallel envs). I've also considered Unity with ML-Agents, which utilizes Apple's Metal API for incredible graphics and handles RL workflows beautifully on Mac. Has anyone successfully built a high-graphics RL/DL robotics pipeline on an M4 Mac? Which simulator did you choose, and what did your Python bridge look like? submitted by /u/Risheyyy [link] [Kommentare]
The deadly Ebola outbreak isn't the only thing causing concern for health workers in Congo. Rumors and disinformation are hindering efforts to contain the virus. The patterns are well-known — and could be confronted.
Paste a raw file into an agent prompt and half your context window is gone before a fix is written. One CSV line per issue beats 500 raw lines every time.
Linux latency on the desktop and in games compared to Windows. Network streaming with Sunshine and Moonlight. Tuning the KWin compositor for lower latencies.
Threat intelligence report: SearchJack. Research by MalExt Sentry.

A blog mostly about Clojure programming