Channels





What Autolykos is Autolykos is an Ergo-based DAO structured as a community investment fund. Its model is to identify high-conviction DeFi infrastructure opportunities, fund them via DAO governance, and deploy capital where it can generate real on-chain yield and long-term value for token holders. DEX PANTHER & DEFINLY is its first funded pilot project. The opportunity Rosen Bridge connects Ergo to Ethereum, Base, BNB Chain, Bitcoin, Cardano, Dogecoin and Bitcoin Runes. Rosen-wrapped versions of those assets exist and are tradable — but there is currently no dedicated, liquid AMM venue for them on any of those host chains. That is a real market gap, not a theoretical one. DEX PANTHER fills it with a competitive constant-product AMM deployed natively on EVM chains. One Solidity codebase, three chains at launch (Ethereum, Base, BNB), zero additional development cost to expand. A Solana build also exists and is parked pending Rosen Bridge adding SOL support. Two products from one build DEX PANTHER — the consumer-facing DEX. Built for traders. Single-sided deposits so new pairs can bootstrap liquidity without needing both sides at once Definly — the same liquidity layer exposed as an API and SDK for builders, merchants, and AI agents that need reliable swap pricing without a consumer brand attached Where it stands Both codebases are written, compiled, and live on GitHub. The EVM build passes 29/29 tests. The proposal is currently open for developer review and quoting before a formal DAO vote on funding. Phase 2 includes a professional security audit before any mainnet deployment. This is early-stage, pre-audit, pre-deployment — the opportunity is to get involved, review, or contribute at the ground floor of a funded DAO pilot with real technical foundations already in place. Links autolykos.io — pitch deck and full proposal Ergo Forum discussion: https://ergoforum.org/t/the-trojan-horse-theory/5332 Paideia governance: https://app.paideia.im/autolykos/discussion/the-trojan-horse-theory-a9d17805-1cf0-428e-91f1-2c53203d13e5 EVM repo: https://github.com/lifeofifa/dex-panther-amm-evm Solana repo: https://github.com/lifeofifa/dex-panther-amm-solana submitted by /u/Square_Cress_1669 [link] [Kommentare]
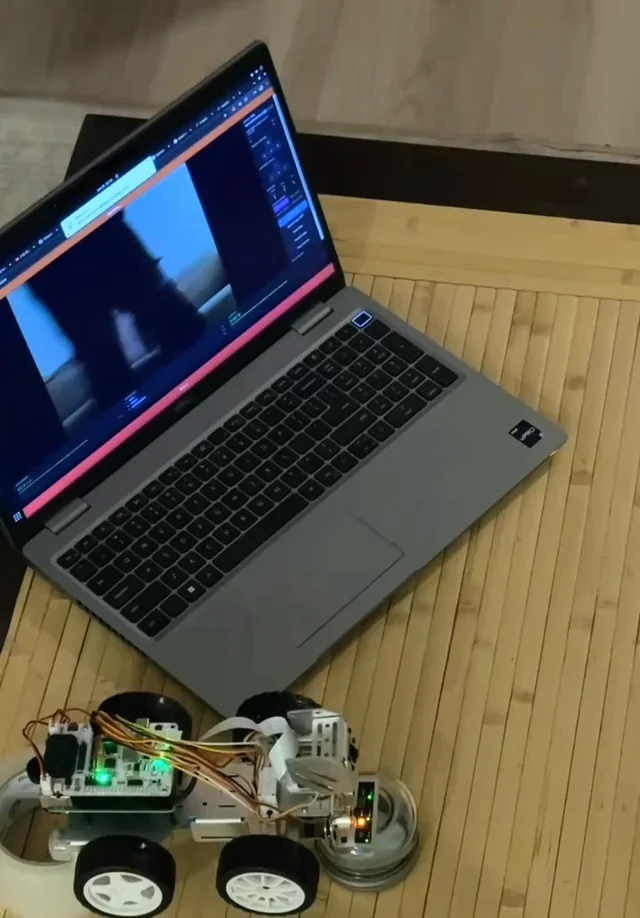
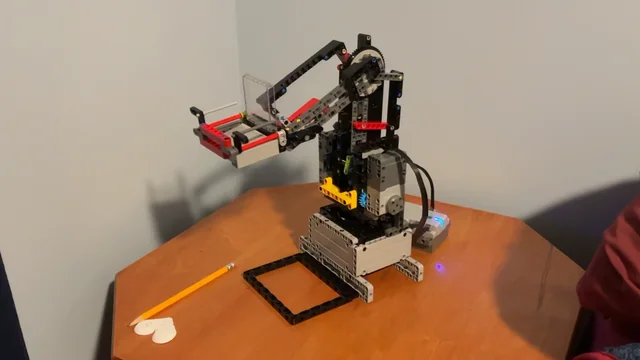
Follow-up to the v2 trajectory post and the noise characterization experiment. v3 adds image-based visual servoing. The problem with v1 v1 tracked horizontally by steering the car body. Ackermann steering has a minimum turning radius — if the tag moves outside a cone in front of the car, the only recovery is a multi-point turn. The camera was locked forward and the car had to point at what it wanted to see. IBVS decouples the camera from the chassis. The pan/tilt gimbal tracks the tag in pixel space regardless of where the car is pointing, and the car centering logic works from the gimbal's pan angle rather than raw image error. The camera can follow a target that the car physically can't yet reach. What v3 adds IBVS core — pan and tilt are driven by pixel error feedback: eu = tag_x − cx, ev = tag_y − cy. Error is smoothed with an EWMA (alpha=0.8), a 10px deadband prevents hunting at center, and corrections are capped at 2° per frame. The result is a gimbal that follows the tag continuously rather than only when the car is pointed at it. Four operational modes — ibvs_test (gimbal only, no drive), manual_ibvs (gimbal + WASD), rat_chase (gimbal + autonomous centering + forward drive), and world_ibvs (full v2 dual-tag world frame behavior). The modes let each layer be validated in isolation before combining them. rat_chase — the autonomous mode shown in the video. Car centering derives a steering angle from the gimbal's current pan angle via a feed-forward gain, then drives forward at a configurable speed and stops at a distance threshold. The car is on a test rig in this clip so the wheels are suspended — this is a hardware-in-the-loop simulation of the drive logic before putting it on the floor. ibvs_anchor_mode world frame — tag0 alone is now enough to anchor the world frame. First detection seeds T_world_anchor; every subsequent frame derives world → car_base from that anchor and the current tag0 pose. No second tag required. The full URDF renders in RViz2 and the car trajectory publishes live. Trajectory visualizer — trajviz.py reads the PLY files output by tf_bridge and produces an interactive Plotly HTML with a color gradient over time, cubic spline overlay, and sliders for spline order and smoothing weight. What the video shows The car is suspended on a test rig — wheels off the floor — running in rat_chase mode. Pan/tilt hunts briefly at the start while the EWMA settles, then locks onto the tag and tracks it. The gimbal motion looks smooth on the car itself; some snappiness is visible in the camera output feed, which is the per-frame correction still present at the edges of the lazy band. Drive and steering commands are being issued but the wheels aren't in contact with anything. Next step is putting it on the floor and running it for real. Bugs worth mentioning TF never broadcast in ibvs_test/manual_ibvs. tf_pub.on_frame() was only called inside _do_chasing(), which the ibvs_test and manual_ibvs branches never reach — they return early. Pi was detecting the tag correctly but zero messages reached tf_bridge. Fix: added the on_frame() call directly in the early-return branch. Z filter rejecting all valid frames — twice. The first version checked car_base_pos[2] against a floor threshold; car base is at Z≈0 so every frame failed. Fixed to check camera height instead. Second version: valid camera height readings clustered just below the threshold (0.000–0.054m vs 0.055m cutoff) and still got rejected universally. Root cause was that I was physically lifting the car during testing so Z filtering is inappropriate in that context. Made the filter an opt-in ROS2 param, defaulted off. Velocity gate blocking hand-carried movement. The jump gate inherited from v2 was set at 10cm — fine for autonomous driving, but every footstep when carrying the car exceeds that. Result: 62 skipped frames in 11 seconds, 2 trajectory points recorded. Added a separate ibvs_max_jump_m param (default 1.0m) for the ibvs_anchor path. What's next Put rat_chase on the floor with the wheels down. The steering and drive logic is implemented and confirmed sending commands — it just hasn't chased anything yet under its own power in v3. That's the next session. References Post history v2 noise characterization experiment v2 trajectory post v1 tag chaser PiCar-X introduction Hardware / code PiCar-X on Amazon Git repo submitted by /u/okineedaplan [link] [Kommentare]
An overview of what the WSL container feature is, and how to use it to run Linux container workflows on Windows

Automate SOC 2 and EU AI Act compliance with Spire's AI compliance agent.
Right off the bat, let’s give a shout out to the mathematician propeller-heads who create the transf ...

New York, June 25, 2026—The Committee to Protect Journalists (CPJ) is conducting a full review of its database of journalists killed during the Israel-Gaza War after militant groups Hamas and Palestinian Islamic Jihad (PIJ) published obituaries identifying as combatants individuals previously listed by CPJ as journalists. In all countries and conflicts, CPJ removes names from...

Credit: Oscar alexander CC-BY-SA-3.0 https://creativecommons.org/licenses/by-sa/3.0/deed.en Consider this past question from an "ethical hacking" certification posted on itexamanswers.net 1 : Which threat actor term describes a well-funded and motivated group that will use the latest attack techniques for financial gain? hacktivist state-sponsored attacker organized crime insider threat The question describes the threat actor as follows: The threat actor is a group of, presumably, people They're well-funded They're motivated They use the latest attack techniques They desire financial gain A hacktivist, a horrible portmanteau of hack and activism, in the examiners head is likely underfunded and doesn't desire financial gain. 2 Never mind that the term activism intends to delegitimize people's political when someone selectively calls a person activist when they don't agree with that person's opinion. Let's rule out hacktivist then. A state-sponsored attacker can seek financial gain. This can happen directly or indirectly. State-sponsored groups performing espionage can create financial gain for a country when they steal trade secrets. The sponsoring state likely compensates them well for their work: a direct financial gain. Let's call this a yes then. What about organized crime? If they manage their finances right, they may be well-funded. They need more finances, so they desire financial gain. It's questionable whether they use the latest attack techniques. If the examiner thinks that the OWASP Top 10 classify as latest attack techniques, then organized crime are a yes for this question. Lastly, consider an insider threat. They may be well-funded and are perhaps receiving money from an outside group. Who's to say that they're not using the latest attack techniques? They may desire financial gain for all we know. Let's call this a yes for this question, too. Too bad that this question isn't a multiple-choice question. Here's the "correct" answer: organized crime The author on itexamanswers.net explains: Several years ago, the cybercrime industry took over the number-one spot for the most profitable illegal industry, attracting a new type of cyber-criminal. Organized crime goes where the money is. It consists of very well-funded and motivated groups that will typically use any of the latest attack techniques to gain access to information systems. Perhaps the author wants to evoke the image of wealthy ransomware gangs in your mind6. At the same time, state-sponsored attacks provide a steady income to North Korea. The U.S. Department of the Treasury alleges that North Korea-affiliated attackers stole over 3 billion USD in mostly cryptocurrency between 2022 and 2025.3 I find little value in cybersecurity education if it merely teaches you outdated trivia that never leaves room for nuance. I doubt that the companies trying to fill their 750,000 cybersecurity roles 4 need workers armed with boring information morsels. Then again, I doubt that these 750,000 roles exist in the first place or that these companies offer salaries high enough to motivate workers to fill these roles. You're likely to attain more worthwhile knowledge by purchasing a second-hand wireless router, dumping the firmware, and finding a null-pointer dereference bug.5 Which threat actor term describes a well-funded and motivated group that will use the latest attack techniques for financial gain? on itexamanswers.net from Oct 11, 2023 ↩ You'd think someone being underfunded means that they're interested in having more finances to do their activism ↩ Treasury Sanctions DPRK Bankers and Institutions Involved in Laundering Cybercrime Proceeds and IT Worker Funds home.treasury.gov. Nov 4, 2025 ↩ Cybersecurity Workforce Shortage: A Comprehensive 2025 Study acsmi.org ↩ Which I've done: Security Advisory on Null pointer Dereference Vulnerability on TP-Link TL-WR841N (CVE-2025-9014) from Jan 15, 2026 ↩ Or perhaps I've listened to too much Darknet Diaries last year. ↩
Replacing Systemd with OpenRC in Debian Posted on: 2026-06-24 Modified on: 2026-06-28Categories: LinuxTags: Debian , ARM , Systemd , OpenRCTL;DRI'm not a fan of systemd but I'm not against its use either. AKA if it works for you then it's ok.My case though is more of a mix between curiosity and discomfort. Curiosity of how init systems works and discomfort of how systemd integrates things or new features.I'm aware that it works well for most of its use cases (I've been using it since its early days) and also I agree that systemd breaks all KISS philosphy principles, but other projects do it as well, right?So why the discomfort?Well it began a while ago, when I was reading some news of how the project started to grab more and more responsibilities that belongs to other projects and how some prod deployments failed so bad because of a breaking change that could've been prevented if that responsibility wasn't part of systemd. Nothing too worrying for me though, in any case the first real kick of discomfort came when age verification law was cooking and my innocent thought was Ok, Windows and Mac will integrate it, but Linux and other OpenSource OSs and projects will "fight" against this ridiculous law!!.Then my next thought was Wait what?, the law is not even approved on some states/countries and systemd already integrated it, why?, what happened with the usual "fight" against non-sense laws?.I got pretty mad about it, I know, I'm not a contributor of that project and it's only an optional field but it didn't feel right at all. All the hate that the dev got wasn't right either.Then the second kick of discomfort came while I was reading tech news and I found this one systemd integrates sys-install systemd integrates it's own "system installer" called 'systemd-sysinstall' among other things.All right, one thing is to have tons of responsibilities for an init system. But another one is going from being PID 1 to being the sys installer too, and no matter how you want to sell that idea there's an ocean of difference on what you can call "Init system responsibilities" and "Systemd's weird responsibilities and wishes". So the curiosity entered the game and decided to try to install OpenRC on my Thinkpad X13s Snapdragon which I use for home hacking, testing stuff, etc. Laptop is running Debian BTW.InstallationInstalling OpenRC in Debian Testing is not hard but isn't a trivial operation either. I faced a few challenges and issues regarding to how apt-get and apt works with essential packagesChallengesI faced two major challenges while trying to install OpenRC at the same time as uninstalling Systemd.apt-get can't uninstall systemd at all and only errors out that is not possibleapt shows a better error of why it can't uninstall systemdAfter digging a bit about it and reading a few pages on the internet, I learned that i need to pass an argument to apt thus it can uninstall an essential package. So for uninstalling it'll be something like this:sudo apt purge --allow-remove-essential systemdDon't copy and paste it yet.Before deleting systemd, need to be sure that OpenRC will be installed, to so the command will besudo apt purge --allow-remove-essential systemd && sudo apt install openrc sysvinit-coreThat command will uninstall systemd and install some dependencies that might not be needed in the future.IssuesAfter installing OpenRC and uninstalling systemd, system didn't boot properly, so I had to go to recovery mode and hit Ctrl-D to allow me to fix the error.Issue itself was that while uninstalling systemd somehow OpenRC was removed too or not installed at all. So I went to recovery mode, then I connected to my wifi network and installed OpenRC again with apt install openrc sysvinit-core.So far so good. But neither Battery Status nor Audio worked. I knew that battery status was due to the kernel's regression I faced while installing Debian Testing on the laptop. So I converted my systemd service to a script and put it in /etc/init.d/, thus OpenRC can start it or enable it. It worked. I think audio needs a different service related to pipewire and wireplumber, or to launch them on login. I'll test them later on.Systemd Service:[Unit] Description=Start Qualcomm remoteprocs (SLPI/ADSP/CDSP) DefaultDependencies=no After=initrd-root-fs.target local-fs.target Before=sysinit.target [Service] Type=oneshot RemainAfterExit=yes ExecStart=/bin/sh -c 'echo start > /sys/class/remoteproc/remoteproc0/state; echo start > /sys/class/remoteproc/remoteproc1/state; echo start > /sys/class/remoteproc/remoteproc2/state' [Install] WantedBy=sysinit.targetOpenRC Script#!/bin/sh echo start > /sys/class/remoteproc/remoteproc0/state; echo start > /sys/class/remoteproc/remoteproc1/state; echo start > /sys/class/remoteproc/remoteproc2/state;I need to convert it into a proper OpenRC scriptFutureCurrently OpenRC does the work. I'm not sure if it'll be my default Init system for the comming ages, but I feel that my experiment was successful.I'll continue testing OpenRC on my "Home Hacking Laptop" for the next days, maybe weeks, and if I feel comfortable enough I'll migrate my work laptop (which runs Debian Testing too and has the same dotfiles in it) to OpenRC as well.Even though changing Init System on a working Linux installation has its quirks and challenges and might not be the best idea, I'm happy with my current results.If this works for you too, then I'll be happier to know that you're ditching systemd in favor of OpenRC as well, aside from jokes, in the end that's part of the unix freedom to use whatever you want and whatever works for you.Happy Hacking!!LinksSome links if you're interested in OpenRC tooDebian: Switching Init System Easily (OpenRC, Sysvinit, Runit)Beyond systemd: A Technical Deep Dive into OpenRC for Modern Linux SystemsIntroduction to OpenRC: Managing Services with EaseOpenRC on debian