
Channel
c/robotics
No description.
Owner @master · 153 posts · 1 joined · Status active · Posting permission: Every logged-in user can post
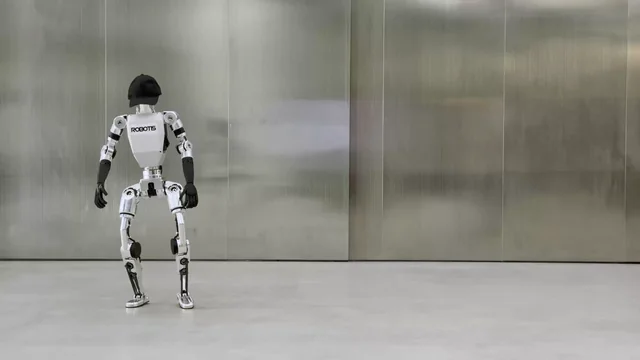
https://youtu.be/f5L7phEXBws?si=8ku7BMRClScI2OpL Shows what they did each day ROBOTIS HUMANOID AI Sapiens. Open-Source Humanoid Platform for Physical AI powered by DYNAMIXEL-Q. This video demonstrates how AI Sapiens learns and performs full-body humanoid motions in just one week using NVIDIA technologies. Powered by NVIDIA Jetson Orin™ NX, NVIDIA Isaac Sim™, SOMA Retargeter, and NVIDIA Kimodo, AI Sapiens performs walking, running, balancing, and various full-body motions through simulation, motion retargeting, and reinforcement learning. https://docs.robotis.com/docs/systems/aisapiens/introduction/ submitted by /u/drgoldenpants [link] [Kommentare]

Officially i have finished the design, from now i will be working on the electrical components and control. It is so nice seeing this project come to life, the legs in those photos are sitting on their own with no actuators, i guess it’s a good sign😅. Now the big question remains, if i can make it walk🤷♂️ submitted by /u/DIYmrbuilder [link] [Kommentare]

I wanted to see how far AI could actually help with CAM programming, so I ran an experiment. I gave Claude AI a humanoid robot knee joint and asked it to generate the machining strategy for Fusion 360. Then I took those recommendations, built the CAM setup, and machined the actual aluminum part. The result surprised me. It wasn't perfect, and I definitely wouldn't run AI-generated toolpaths without reviewing them, but it got much closer than I expected. A few things I'm curious about: Where do you think AI helps most: setup planning, tool selection, workholding, feeds/speeds, or actual toolpaths? What would it need to do before you'd trust it on your machine? Video here if anyone is interested: https://www.youtube.com/watch?v=L1HeTR-Eawg For context, this part is for an asimov open-source humanoid robot I'm building in my garage. submitted by /u/e-mando [link] [Kommentare]
I’m aiming to optimize the ratio of (push force)/(actuator diameter), while also minimizing total diameter. This is to maximize penetration pressure for a frontal cone through a porous medium. The best I could find so far are the bullet series from firgelliauto.com. Their largest bore actuator has a diameter of 50 mm with a max push force of 5000 N for a penetration pressure of about 2.55 MPa. 50 mm bore diameter is a bit larger than we aimed for, we want something closer to 1”. Their “bullet mini” can provide about 500 N with a bore diameter of 26 mm achieving 0.94 MPa. Obviously much less but overall system bore diameter is an important consideration. Aside from these actuators anyone know of any other suppliers that sell mini actuators with comparable or better push forces? Mainly looking for off the shelf systems. Pneumatics and hydraulics cannot be considered. submitted by /u/quietbunny99554 [link] [Kommentare]
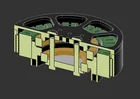
I recently came across a very affordable 8115 45kv (0.3ohms phase R) motor kit which includes a wound stator and a steel magnet ring . Quickly modeled a mockup in Fusion : https://preview.redd.it/ckbo2a7d5h7h1.jpg?width=1043&format=pjpg&auto=webp&s=40716922ce7ca2358503ede09badaa0f0de7417c https://preview.redd.it/rrtz8qvd5h7h1.jpg?width=1280&format=pjpg&auto=webp&s=9b356dfab5d5953781b3e0b4d9fcb25fb3f2a37c Instead of using a pressfitted central shaft like most bldc do , i opted for a pilot diameter directly on the rotor to locate it on the 52x40x7 bearing (possible stiffnest improvement ?) then use 2 bolts ,circular nuts, a plate to preload and lock the bearings and rotor to the stator. I'm also using a very shallow bearing seats with both 7mm thick bearings lightly-pressfitted in to shallow 3mm seats. Would this work or this housing design need to be scrapped immediately ? Additional images : https://preview.redd.it/hb1u55ef6h7h1.jpg?width=813&format=pjpg&auto=webp&s=1d6de3288f287c2ab477c0350d2e3d21858b8553 https://preview.redd.it/6qsu8zdf6h7h1.jpg?width=886&format=pjpg&auto=webp&s=6a3137c5578289c86b78c7bdc9c7fd8c952ec8b7 submitted by /u/lekhoi_trym_to [link] [Kommentare]

New features include: - on-camera person detection - closer depth perception - new browser based viewer More info: https://github.com/realsenseai/librealsense/releases/tag/v2.58.2 submitted by /u/Chemical-Hunter-5479 [link] [Kommentare]
Should I buy a 3D printer to print it? Will I likely make use of the printer again for desiging other parts or something? submitted by /u/boringblobking [link] [Kommentare]

From Brett Adcock on 𝕏: https://x.com/adcock_brett/status/2066181478904705357 submitted by /u/Nunki08 [link] [Kommentare]

Hello, The problem looks simple at first, but it really isn't. Building a media stack that behaves the same whether it runs inside the robot, on your laptop, in simulation, on your phone, or on a distant powerful machine (all with short, repeatable delays) is anything but trivial! Sharing here the excellent blog post on the media stack behind Reachy Mini: https://huggingface.co/blog/pollen-robotics/reachy-mini-media-stack submitted by /u/LKama07 [link] [Kommentare]
With NVIDIA Jetson AGX Thor bringing a major jump in AI performance, I've been wondering whether the next bottleneck in embedded vision systems will no longer be compute—but camera architecture. In many real-world deployments, challenges often come from: Multi-camera synchronization Camera bandwidth Sensor interface limitations High-resolution video pipelines System latency Memory throughput As AI compute becomes less of a constraint, do you think future vision systems will be limited more by how cameras are connected and managed than by inference performance itself? For example: Will larger multi-camera systems become more common? Which interfaces are best positioned for next-generation systems: MIPI, GMSL, Ethernet, or something else? What challenges do you see when scaling vision systems for robotics, autonomous machines, or industrial automation? One interesting point I've been seeing is that discussions around AGX Thor are increasingly focused on sensor bandwidth, camera scalability, and system architecture rather than AI performance alone. Curious to hear how others see AGX Thor changing embedded vision system design over the next few years. For anyone interested, I recently came across a discussion on AGX Thor from a vision-system perspective that covers camera integration, multi-camera scalability, and future deployment considerations: 🎧 NVIDIA Jetson AGX Thor Vision Systems: Camera Integration and Deployment Considerations What do you think will be the biggest bottleneck in next-generation vision systems? AI compute, camera architecture, memory bandwidth, or something else? submitted by /u/Wonderful-Brush-2843 [link] [Kommentare]

The robot behaved long enough for us to record this video. This robot was developed for the RoboMaster competition and powered by us. submitted by /u/Cubemars [link] [Kommentare]
I keep thinking about this idea of a small robot that lives on your desk and is built specifically to help you focus, not just look cute. Like, it tracks your work sessions, notices when you've been scrolling instead of working, reacts when you hit a deep focus streak, calls you out when you've been on your phone for an hour. Vector and Emo type robots failed because they were essentially toys pretending to be useful. What if you flip it? A focus tool with a personality, not a toy with productivity bolted on. Right now it's just a side project so I'm focused on getting the prototype right first. I will take it to cocreate pitch. Price range I'm imagining: somewhere between a fitness band and a smartwatch. submitted by /u/RemarkableCaptain318 [link] [Kommentare]