Foveon
A neural sensor translator. Takes a photo from any
Bayer-array camera and renders it as if it were shot on a Sigma DP2
Merrill — the Foveon X3 stacked-sensor look, with
the colour and microdetail Foveon is famous for, on hardware you already
own.
Under the hood: a modified U-Net with an extra layer injected
between the encoder bottleneck and the upsampling decoder. The injected
channel carries a one-dimensional encoding of three-layer pixel-stack
structure — the B·G·R photodiode column that a Foveon
sensor captures and a Bayer sensor can’t. Trained end-to-end against
matched Bayer → Merrill scene pairs.
U-Net+1D
Modified U-Netwith 3-layer pixelinjection at bottleneck
Bayer → X3
Bayer CFA in,Foveon X3 stacked-sensor look out
DP2 Merrill
Trained on matchedscene pairs againstSigma DP2 Merrill
⤓ Download Foveon.dmg
macOS 13+ · Apple Silicon
33 MB · signed DMG installer · unverified-developer
gatekeeper: right-click Open the first time
Foveon — macOS app. Choose a photo, drag the sliders, save the result.
What it is
Most digital cameras capture colour through a Bayer colour filter
array: each photosite sees only one of R, G, or B, and the other
two channels are interpolated from the neighbours (demosaiced). It’s
efficient, but it costs you. The interpolation introduces colour fringing
on sharp edges, smears fine detail, and produces the “digital”
micro-contrast that even high-end Bayer cameras can’t fully shake.
The Foveon X3 sensor — Sigma’s now-rare design
used in the DP1, DP2, and DP3 Merrill cameras — works the way colour
film does. Three photodiode layers are stacked vertically at every single
pixel position. The top layer absorbs blue, the middle layer green, the
bottom layer red. Every pixel captures the full colour. No interpolation,
no demosaicing artefacts, no false detail. The result is the
“Foveon look”: extraordinary microdetail and a particular colour
rendition — warm, dimensional, almost slide-film — that people
build entire camera systems around.
Foveon (the app) is a neural network that learns the
mapping between the two. Feed it a JPEG or RAW from a normal Bayer camera
(phone, mirrorless, DSLR) and it predicts what the same scene would look
like shot on a Foveon X3 sensor. Geometry stays the same; colour,
tonality, and micro-detail rendering shift toward the Merrill side of
the training distribution.
Bayer vs Foveon — the structural problem
Bayer CFA
One colour per pixel
R
G ×2
B
Each photosite captures exactly one colour. The other two
channels are guessed from the neighbours. The guess is what
creates the “digital” signature.
Foveon X3
Three layers per pixel
red (bottom)
green (middle)
blue (top)
stacked photodiodes, one per pixel
Every pixel records R, G, and B separately at the same
location. No interpolation. No false colour. The dimensional
quality Merrill shooters chase.
The architecture
The core is a standard convolutional U-Net: an encoder
that downsamples the input image into a compact feature bottleneck,
paired with a decoder that upsamples back to full resolution, with
skip connections at every level so fine spatial detail survives
the trip through the bottleneck.
The modification is a single new layer dropped in between the encoder’s
final downsampling block and the decoder’s first upsampling block: a
1D pixel-stack injection layer that concatenates a
one-dimensional encoding of how colour absorbs through silicon depth on
a real Foveon sensor — blue first, then green, then red. The
decoder learns to use this prior to reconstruct the kind of inter-channel
coupling that real X3 captures exhibit — chroma that’s registered
with luminance instead of interpolated against it.
U-Net architecture diagram. Encoder ENC1 (C=64) → ENC2 (C=128) →
ENC3 (C=256) → ENC4 (C=512) → Bottleneck (C=1024) → 1D Pixel-Stack
Injection (B·G·R depth prior) → DEC4 (C=512) → DEC3 (C=256) →
DEC2 (C=128) → DEC1 (C=64) → output, with skip connections from each
encoder level to the matching decoder level.
Encoder (blue) downsamples the Bayer input. The
1D injection layer (orange) concatenates the Foveon
B·G·R depth prior at the bottleneck. Decoder
(purple) upsamples back to full resolution. Skip connections
(dashed) carry pre-bottleneck spatial detail across to the matching decoder
level — standard U-Net, drawn here for completeness. The novel piece
is the orange block.
Why inject at the bottleneck
The encoder has just stripped spatial resolution to focus on
semantic content; the decoder is about to reconstruct it back.
That’s exactly the moment to inject the prior that says
“reconstruct as if the sensor were stacked, not mosaiced.”
Inject earlier and the encoder learns to ignore it; inject later
and the decoder has already committed to a demosaic-style chroma
reconstruction.
Why one-dimensional
The injection encodes the order in which colour absorbs
through silicon depth on a real Foveon sensor — blue at the
top, green in the middle, red at the bottom. That ordering is a
1D signal per pixel column, not a 2D spatial structure. Keeping
it 1D keeps the parameter count low and forces the network to
learn the inter-channel coupling rather than memorise a per-region
lookup.
Training
The model is trained end-to-end against matched scene pairs: the same
subject captured simultaneously by a Bayer-sensor camera and a Sigma
DP2 Merrill, the two images aligned and cropped to identical framing.
The Bayer image is the network input; the Merrill image is the
reconstruction target.
STEP 1
Capture matched pairs
A Bayer-sensor camera and a Sigma DP2 Merrill are tripod-mounted
side-by-side. Each scene is photographed simultaneously by both.
We bias capture toward the categories where Foveon rendering
differs most visibly from Bayer: outdoor light, foliage, skin
tones, fabric, water, metallic surfaces.
STEP 2
Align & crop
For each pair we run a homography-based alignment (feature-matched
on luminance) so the two images share an identical pixel grid
despite the different sensor sizes, focal lengths, and viewpoints.
The aligned tiles are cropped to common framing and resampled to a
shared resolution. Misaligned pairs are filtered out.
STEP 3
Develop the Merrill target
DP2 Merrill RAW (.X3F) files are developed in Sigma Photo Pro with
neutral parameters — zero added sharpening, native colour
profile, no creative tone curve. This is the “ground truth”
the network is asked to predict: what the X3 sensor saw, minimally
interpreted.
STEP 4
Tile & augment
Each aligned pair is sliced into overlapping 256×256 tiles
for training (the U-Net handles arbitrary input sizes at inference,
but training on fixed tiles keeps batches efficient). Augmentations:
random crop, horizontal flip, small rotation, exposure jitter on
both halves of the pair in lock-step.
STEP 5
Loss composition
Three components, summed with weights tuned to keep colour and
detail in balance:
L1 pixel loss anchors absolute colour fidelity;
VGG perceptual loss carries microdetail and texture
(the network learns the Merrill look, not just the
average pixel value); a small TV smoothness penalty
keeps the output from inventing sharpening artefacts in flat
regions.
STEP 6
Train & validate
AdamW optimiser at lr = 2e-4, cosine
schedule, mixed-precision on a single 24 GB GPU. Batch size
16 tiles. We hold out roughly 5% of pairs as a validation set
stratified by category (skin, foliage, fabric, etc.) so the model
isn’t accidentally memorising a few scenes. Best checkpoint
is the one that minimises validation perceptual loss, not L1
— perceptual loss tracks the X3 look more reliably than
pixel error.
What it produces
A schematic comparison: what the same uniform skin patch looks like
coming out of a Bayer demosaic pipeline (left) versus what the
network predicts the Merrill would have rendered (right). The Bayer
side has slight chroma drift between cells; the Merrill side is
uniform.
INPUT
Bayer demosaic
visible chroma noisebetween adjacent pixels —the demosaic signature
OUTPUT
Foveon → X3 look
uniform chroma per region,microdetail preserved —the Foveon X3 signature
The app
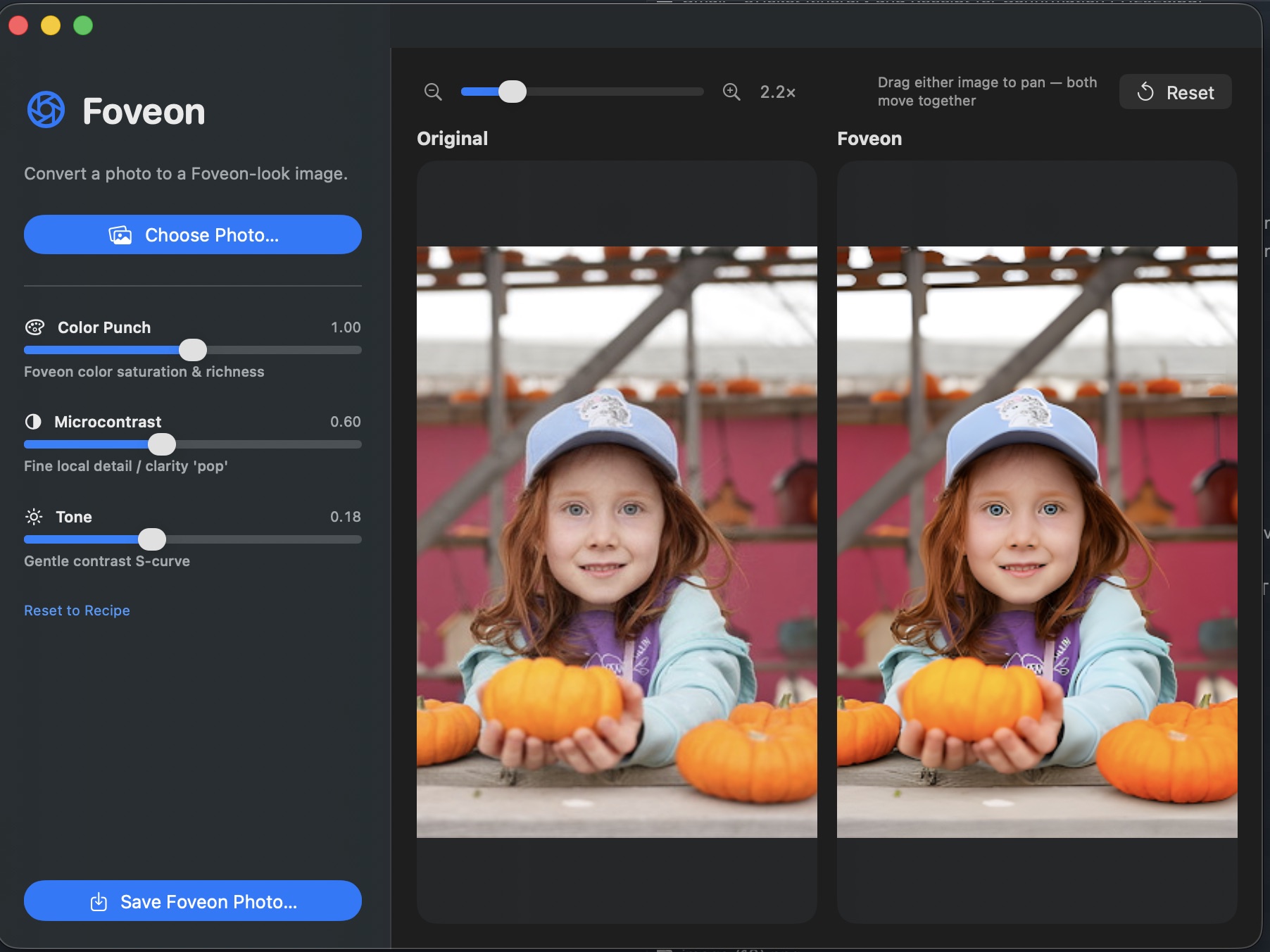
Foveon ships as a native macOS app with a clean three-pane workflow:
pick a photo on the left, watch the preview update on the right.
Three sliders shape the conversion:
Color Punch
Controls how strongly the Foveon colour rendition is applied.
At 0 the output sits closer to the original Bayer
colours; at 1.0 (default) the full Merrill warmth
and saturation come through.
Microcontrast
The Foveon look isn’t about sharpening — it’s about
fine local detail clarity. This slider lifts that quality on top
of the network output without introducing the halo artefacts that
conventional unsharp masking would.
Tone
A gentle contrast S-curve in the output highlights and shadows.
Default 0.18 matches Sigma Photo Pro’s neutral
tone; push it for a more cinematic look, drop it for a flatter
starting point you can grade externally.
Drag either preview panel to pan; both panels move together so the
same crop is always in view on both sides. Reset snaps
the view back to fit, Save Foveon Photo… writes
the result.
Install & use
Foveon runs natively on Apple Silicon. A 24-megapixel input converts
in well under a second on an M2; the model uses MPS for inference
and stays within ~3 GB of unified memory.
⤓ Download Foveon.dmg
macOS 13+ · Apple Silicon · 33 MB
Open the DMG and drag Foveon.app into Applications.
First launch: right-click the app and choose Open (the
DMG is signed but not notarised by Apple yet, so Gatekeeper
asks once).
 Link preview
Foveon — turn a Bayer photo into a Foveon X3 photo
Foveon A neural sensor translator. Takes a photo from any Bayer-array camera and renders it as if it were shot on a Sigma DP2 Merrill — the Foveon X3 stacked-sensor look, with the colour and microdetail Foveon is famous for, on hardware you already own. Under the hood: a modified U-Net with an extra layer injected between the encoder bottleneck and the upsampling decoder. The injected channel carries a one-dimensional encoding of three-layer pixel-stack structure — the B·G·R photodiode column that a Foveon sensor captures and a Bayer sensor can’t. Trained end-to-end against matched Bayer → Merrill scene pairs. U-Net+1D Modified U-Netwith 3-layer pixelinjection at bottleneck Bayer → X3 Bayer CFA in,Foveon X3 stacked-sensor look out DP2 Merrill Trained on matchedscene pairs againstSigma DP2 Merrill ⤓ Download Foveon.dmg macOS 13+ · Apple Silicon 33 MB · signed DMG installer · unverified-developer gatekeeper: right-click Open the first time Foveon — macOS app. Choose a photo, drag the sliders, save the result. What it is Most digital cameras capture colour through a Bayer colour filter array: each photosite sees only one of R, G, or B, and the other two channels are interpolated from the neighbours (demosaiced). It’s efficient, but it costs you. The interpolation introduces colour fringing on sharp edges, smears fine detail, and produces the “digital” micro-contrast that even high-end Bayer cameras can’t fully shake. The Foveon X3 sensor — Sigma’s now-rare design used in the DP1, DP2, and DP3 Merrill cameras — works the way colour film does. Three photodiode layers are stacked vertically at every single pixel position. The top layer absorbs blue, the middle layer green, the bottom layer red. Every pixel captures the full colour. No interpolation, no demosaicing artefacts, no false detail. The result is the “Foveon look”: extraordinary microdetail and a particular colour rendition — warm, dimensional, almost slide-film — that people build entire camera systems around. Foveon (the app) is a neural network that learns the mapping between the two. Feed it a JPEG or RAW from a normal Bayer camera (phone, mirrorless, DSLR) and it predicts what the same scene would look like shot on a Foveon X3 sensor. Geometry stays the same; colour, tonality, and micro-detail rendering shift toward the Merrill side of the training distribution. Bayer vs Foveon — the structural problem Bayer CFA One colour per pixel R G ×2 B Each photosite captures exactly one colour. The other two channels are guessed from the neighbours. The guess is what creates the “digital” signature. Foveon X3 Three layers per pixel red (bottom) green (middle) blue (top) stacked photodiodes, one per pixel Every pixel records R, G, and B separately at the same location. No interpolation. No false colour. The dimensional quality Merrill shooters chase. The architecture The core is a standard convolutional U-Net: an encoder that downsamples the input image into a compact feature bottleneck, paired with a decoder that upsamples back to full resolution, with skip connections at every level so fine spatial detail survives the trip through the bottleneck. The modification is a single new layer dropped in between the encoder’s final downsampling block and the decoder’s first upsampling block: a 1D pixel-stack injection layer that concatenates a one-dimensional encoding of how colour absorbs through silicon depth on a real Foveon sensor — blue first, then green, then red. The decoder learns to use this prior to reconstruct the kind of inter-channel coupling that real X3 captures exhibit — chroma that’s registered with luminance instead of interpolated against it. U-Net architecture diagram. Encoder ENC1 (C=64) → ENC2 (C=128) → ENC3 (C=256) → ENC4 (C=512) → Bottleneck (C=1024) → 1D Pixel-Stack Injection (B·G·R depth prior) → DEC4 (C=512) → DEC3 (C=256) → DEC2 (C=128) → DEC1 (C=64) → output, with skip connections from each encoder level to the matching decoder level. Encoder (blue) downsamples the Bayer input. The 1D injection layer (orange) concatenates the Foveon B·G·R depth prior at the bottleneck. Decoder (purple) upsamples back to full resolution. Skip connections (dashed) carry pre-bottleneck spatial detail across to the matching decoder level — standard U-Net, drawn here for completeness. The novel piece is the orange block. Why inject at the bottleneck The encoder has just stripped spatial resolution to focus on semantic content; the decoder is about to reconstruct it back. That’s exactly the moment to inject the prior that says “reconstruct as if the sensor were stacked, not mosaiced.” Inject earlier and the encoder learns to ignore it; inject later and the decoder has already committed to a demosaic-style chroma reconstruction. Why one-dimensional The injection encodes the order in which colour absorbs through silicon depth on a real Foveon sensor — blue at the top, green in the middle, red at the bottom. That ordering is a 1D signal per pixel column, not a 2D spatial structure. Keeping it 1D keeps the parameter count low and forces the network to learn the inter-channel coupling rather than memorise a per-region lookup. Training The model is trained end-to-end against matched scene pairs: the same subject captured simultaneously by a Bayer-sensor camera and a Sigma DP2 Merrill, the two images aligned and cropped to identical framing. The Bayer image is the network input; the Merrill image is the reconstruction target. STEP 1 Capture matched pairs A Bayer-sensor camera and a Sigma DP2 Merrill are tripod-mounted side-by-side. Each scene is photographed simultaneously by both. We bias capture toward the categories where Foveon rendering differs most visibly from Bayer: outdoor light, foliage, skin tones, fabric, water, metallic surfaces. STEP 2 Align & crop For each pair we run a homography-based alignment (feature-matched on luminance) so the two images share an identical pixel grid despite the different sensor sizes, focal lengths, and viewpoints. The aligned tiles are cropped to common framing and resampled to a shared resolution. Misaligned pairs are filtered out. STEP 3 Develop the Merrill target DP2 Merrill RAW (.X3F) files are developed in Sigma Photo Pro with neutral parameters — zero added sharpening, native colour profile, no creative tone curve. This is the “ground truth” the network is asked to predict: what the X3 sensor saw, minimally interpreted. STEP 4 Tile & augment Each aligned pair is sliced into overlapping 256×256 tiles for training (the U-Net handles arbitrary input sizes at inference, but training on fixed tiles keeps batches efficient). Augmentations: random crop, horizontal flip, small rotation, exposure jitter on both halves of the pair in lock-step. STEP 5 Loss composition Three components, summed with weights tuned to keep colour and detail in balance: L1 pixel loss anchors absolute colour fidelity; VGG perceptual loss carries microdetail and texture (the network learns the Merrill look, not just the average pixel value); a small TV smoothness penalty keeps the output from inventing sharpening artefacts in flat regions. STEP 6 Train & validate AdamW optimiser at lr = 2e-4, cosine schedule, mixed-precision on a single 24 GB GPU. Batch size 16 tiles. We hold out roughly 5% of pairs as a validation set stratified by category (skin, foliage, fabric, etc.) so the model isn’t accidentally memorising a few scenes. Best checkpoint is the one that minimises validation perceptual loss, not L1 — perceptual loss tracks the X3 look more reliably than pixel error. What it produces A schematic comparison: what the same uniform skin patch looks like coming out of a Bayer demosaic pipeline (left) versus what the network predicts the Merrill would have rendered (right). The Bayer side has slight chroma drift between cells; the Merrill side is uniform. INPUT Bayer demosaic visible chroma noisebetween adjacent pixels —the demosaic signature OUTPUT Foveon → X3 look uniform chroma per region,microdetail preserved —the Foveon X3 signature The app Foveon ships as a native macOS app with a clean three-pane workflow: pick a photo on the left, watch the preview update on the right. Three sliders shape the conversion: Color Punch Controls how strongly the Foveon colour rendition is applied. At 0 the output sits closer to the original Bayer colours; at 1.0 (default) the full Merrill warmth and saturation come through. Microcontrast The Foveon look isn’t about sharpening — it’s about fine local detail clarity. This slider lifts that quality on top of the network output without introducing the halo artefacts that conventional unsharp masking would. Tone A gentle contrast S-curve in the output highlights and shadows. Default 0.18 matches Sigma Photo Pro’s neutral tone; push it for a more cinematic look, drop it for a flatter starting point you can grade externally. Drag either preview panel to pan; both panels move together so the same crop is always in view on both sides. Reset snaps the view back to fit, Save Foveon Photo… writes the result. Install & use Foveon runs natively on Apple Silicon. A 24-megapixel input converts in well under a second on an M2; the model uses MPS for inference and stays within ~3 GB of unified memory. ⤓ Download Foveon.dmg macOS 13+ · Apple Silicon · 33 MB Open the DMG and drag Foveon.app into Applications. First launch: right-click the app and choose Open (the DMG is signed but not notarised by Apple yet, so Gatekeeper asks once). Source: https://code.intellios.ai/photo/ code.intellios.ai · code.intellios.ai
Link preview
Foveon — turn a Bayer photo into a Foveon X3 photo
Foveon A neural sensor translator. Takes a photo from any Bayer-array camera and renders it as if it were shot on a Sigma DP2 Merrill — the Foveon X3 stacked-sensor look, with the colour and microdetail Foveon is famous for, on hardware you already own. Under the hood: a modified U-Net with an extra layer injected between the encoder bottleneck and the upsampling decoder. The injected channel carries a one-dimensional encoding of three-layer pixel-stack structure — the B·G·R photodiode column that a Foveon sensor captures and a Bayer sensor can’t. Trained end-to-end against matched Bayer → Merrill scene pairs. U-Net+1D Modified U-Netwith 3-layer pixelinjection at bottleneck Bayer → X3 Bayer CFA in,Foveon X3 stacked-sensor look out DP2 Merrill Trained on matchedscene pairs againstSigma DP2 Merrill ⤓ Download Foveon.dmg macOS 13+ · Apple Silicon 33 MB · signed DMG installer · unverified-developer gatekeeper: right-click Open the first time Foveon — macOS app. Choose a photo, drag the sliders, save the result. What it is Most digital cameras capture colour through a Bayer colour filter array: each photosite sees only one of R, G, or B, and the other two channels are interpolated from the neighbours (demosaiced). It’s efficient, but it costs you. The interpolation introduces colour fringing on sharp edges, smears fine detail, and produces the “digital” micro-contrast that even high-end Bayer cameras can’t fully shake. The Foveon X3 sensor — Sigma’s now-rare design used in the DP1, DP2, and DP3 Merrill cameras — works the way colour film does. Three photodiode layers are stacked vertically at every single pixel position. The top layer absorbs blue, the middle layer green, the bottom layer red. Every pixel captures the full colour. No interpolation, no demosaicing artefacts, no false detail. The result is the “Foveon look”: extraordinary microdetail and a particular colour rendition — warm, dimensional, almost slide-film — that people build entire camera systems around. Foveon (the app) is a neural network that learns the mapping between the two. Feed it a JPEG or RAW from a normal Bayer camera (phone, mirrorless, DSLR) and it predicts what the same scene would look like shot on a Foveon X3 sensor. Geometry stays the same; colour, tonality, and micro-detail rendering shift toward the Merrill side of the training distribution. Bayer vs Foveon — the structural problem Bayer CFA One colour per pixel R G ×2 B Each photosite captures exactly one colour. The other two channels are guessed from the neighbours. The guess is what creates the “digital” signature. Foveon X3 Three layers per pixel red (bottom) green (middle) blue (top) stacked photodiodes, one per pixel Every pixel records R, G, and B separately at the same location. No interpolation. No false colour. The dimensional quality Merrill shooters chase. The architecture The core is a standard convolutional U-Net: an encoder that downsamples the input image into a compact feature bottleneck, paired with a decoder that upsamples back to full resolution, with skip connections at every level so fine spatial detail survives the trip through the bottleneck. The modification is a single new layer dropped in between the encoder’s final downsampling block and the decoder’s first upsampling block: a 1D pixel-stack injection layer that concatenates a one-dimensional encoding of how colour absorbs through silicon depth on a real Foveon sensor — blue first, then green, then red. The decoder learns to use this prior to reconstruct the kind of inter-channel coupling that real X3 captures exhibit — chroma that’s registered with luminance instead of interpolated against it. U-Net architecture diagram. Encoder ENC1 (C=64) → ENC2 (C=128) → ENC3 (C=256) → ENC4 (C=512) → Bottleneck (C=1024) → 1D Pixel-Stack Injection (B·G·R depth prior) → DEC4 (C=512) → DEC3 (C=256) → DEC2 (C=128) → DEC1 (C=64) → output, with skip connections from each encoder level to the matching decoder level. Encoder (blue) downsamples the Bayer input. The 1D injection layer (orange) concatenates the Foveon B·G·R depth prior at the bottleneck. Decoder (purple) upsamples back to full resolution. Skip connections (dashed) carry pre-bottleneck spatial detail across to the matching decoder level — standard U-Net, drawn here for completeness. The novel piece is the orange block. Why inject at the bottleneck The encoder has just stripped spatial resolution to focus on semantic content; the decoder is about to reconstruct it back. That’s exactly the moment to inject the prior that says “reconstruct as if the sensor were stacked, not mosaiced.” Inject earlier and the encoder learns to ignore it; inject later and the decoder has already committed to a demosaic-style chroma reconstruction. Why one-dimensional The injection encodes the order in which colour absorbs through silicon depth on a real Foveon sensor — blue at the top, green in the middle, red at the bottom. That ordering is a 1D signal per pixel column, not a 2D spatial structure. Keeping it 1D keeps the parameter count low and forces the network to learn the inter-channel coupling rather than memorise a per-region lookup. Training The model is trained end-to-end against matched scene pairs: the same subject captured simultaneously by a Bayer-sensor camera and a Sigma DP2 Merrill, the two images aligned and cropped to identical framing. The Bayer image is the network input; the Merrill image is the reconstruction target. STEP 1 Capture matched pairs A Bayer-sensor camera and a Sigma DP2 Merrill are tripod-mounted side-by-side. Each scene is photographed simultaneously by both. We bias capture toward the categories where Foveon rendering differs most visibly from Bayer: outdoor light, foliage, skin tones, fabric, water, metallic surfaces. STEP 2 Align & crop For each pair we run a homography-based alignment (feature-matched on luminance) so the two images share an identical pixel grid despite the different sensor sizes, focal lengths, and viewpoints. The aligned tiles are cropped to common framing and resampled to a shared resolution. Misaligned pairs are filtered out. STEP 3 Develop the Merrill target DP2 Merrill RAW (.X3F) files are developed in Sigma Photo Pro with neutral parameters — zero added sharpening, native colour profile, no creative tone curve. This is the “ground truth” the network is asked to predict: what the X3 sensor saw, minimally interpreted. STEP 4 Tile & augment Each aligned pair is sliced into overlapping 256×256 tiles for training (the U-Net handles arbitrary input sizes at inference, but training on fixed tiles keeps batches efficient). Augmentations: random crop, horizontal flip, small rotation, exposure jitter on both halves of the pair in lock-step. STEP 5 Loss composition Three components, summed with weights tuned to keep colour and detail in balance: L1 pixel loss anchors absolute colour fidelity; VGG perceptual loss carries microdetail and texture (the network learns the Merrill look, not just the average pixel value); a small TV smoothness penalty keeps the output from inventing sharpening artefacts in flat regions. STEP 6 Train & validate AdamW optimiser at lr = 2e-4, cosine schedule, mixed-precision on a single 24 GB GPU. Batch size 16 tiles. We hold out roughly 5% of pairs as a validation set stratified by category (skin, foliage, fabric, etc.) so the model isn’t accidentally memorising a few scenes. Best checkpoint is the one that minimises validation perceptual loss, not L1 — perceptual loss tracks the X3 look more reliably than pixel error. What it produces A schematic comparison: what the same uniform skin patch looks like coming out of a Bayer demosaic pipeline (left) versus what the network predicts the Merrill would have rendered (right). The Bayer side has slight chroma drift between cells; the Merrill side is uniform. INPUT Bayer demosaic visible chroma noisebetween adjacent pixels —the demosaic signature OUTPUT Foveon → X3 look uniform chroma per region,microdetail preserved —the Foveon X3 signature The app Foveon ships as a native macOS app with a clean three-pane workflow: pick a photo on the left, watch the preview update on the right. Three sliders shape the conversion: Color Punch Controls how strongly the Foveon colour rendition is applied. At 0 the output sits closer to the original Bayer colours; at 1.0 (default) the full Merrill warmth and saturation come through. Microcontrast The Foveon look isn’t about sharpening — it’s about fine local detail clarity. This slider lifts that quality on top of the network output without introducing the halo artefacts that conventional unsharp masking would. Tone A gentle contrast S-curve in the output highlights and shadows. Default 0.18 matches Sigma Photo Pro’s neutral tone; push it for a more cinematic look, drop it for a flatter starting point you can grade externally. Drag either preview panel to pan; both panels move together so the same crop is always in view on both sides. Reset snaps the view back to fit, Save Foveon Photo… writes the result. Install & use Foveon runs natively on Apple Silicon. A 24-megapixel input converts in well under a second on an M2; the model uses MPS for inference and stays within ~3 GB of unified memory. ⤓ Download Foveon.dmg macOS 13+ · Apple Silicon · 33 MB Open the DMG and drag Foveon.app into Applications. First launch: right-click the app and choose Open (the DMG is signed but not notarised by Apple yet, so Gatekeeper asks once). Source: https://code.intellios.ai/photo/ code.intellios.ai · code.intellios.ai
Comments