 Link preview
It is working :D - RGB-D to hoover position (first step before grasping)
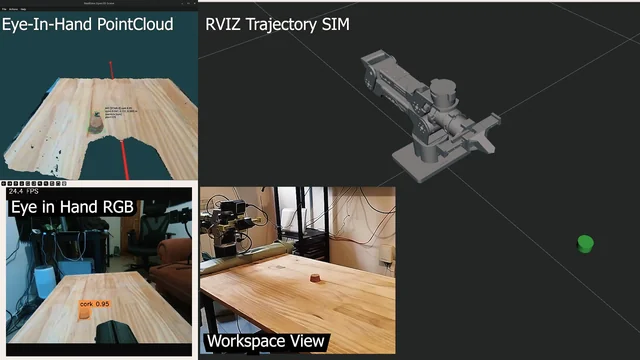
Another working step in my robotics pipeline! It detects the object with a finetuned YOLOv26, deprojects the RGB-D mask into a 3D point cloud, estimates the object position, sends the target to MoveIt, checks IK solver, plans the trajectory in RViz, and executes the motion on the robot before picking it. (next step!) If the object is moved, the target updates and the robot plans again. submitted by /u/nettrotten [link] [Kommentare] reddit.com · reddit.com
Link preview
It is working :D - RGB-D to hoover position (first step before grasping)
Another working step in my robotics pipeline! It detects the object with a finetuned YOLOv26, deprojects the RGB-D mask into a 3D point cloud, estimates the object position, sends the target to MoveIt, checks IK solver, plans the trajectory in RViz, and executes the motion on the robot before picking it. (next step!) If the object is moved, the target updates and the robot plans again. submitted by /u/nettrotten [link] [Kommentare] reddit.com · reddit.com
Another working step in my robotics pipeline! It detects the object with a finetuned YOLOv26, deprojects the RGB-D mask into a 3D point cloud, estimates the object position, sends the target to MoveIt, checks IK solver, plans the trajectory in RViz, and executes the motion on the robot before picking it. (next step!) If the object is moved, the target updates and the robot plans again. submitted by /u/nettrotten [link] [Kommentare]
Comments