 Link preview
ROS2 workspace for Borunte BRTIRUS0707A 6DOF arm
I have a Borunte BRTIRUS0707A 6-axis arm (HC1 controller, F5.2.1 firmware) and there was no ROS 2 support for it, so I created one and put it on GitHub: 👉 https://github.com/rqtqp/ros2_borunte_0707A It's a ROS 2 (Humble) workspace that talks to the controller over its JSON-over-TCP interface (port 9760) — no vendor SDK needed. What works today: Telemetry — live joint state on /joint_states, plus controller status/health. MoveIt 2 motion — Plan + Execute in RViz actually moves the real arm (the bridge turns the planned trajectory into the controller's AddRCC motion command). Safety — dry-run by default, live precondition gate (mode/alarm/limits), soft limits, and a /stop abort service. Model (URDF + meshes) and a MoveIt config included, plus a documented mechanical-zero (groove/blade) home calibration. Sharing it in case it's useful to anyone working with these arms. If you have questions about this piece of equipment (the arm, the HC1 controller, or its remote-command protocol), feel free to ask 🙂 submitted by /u/tru0ne [link] [Kommentare] reddit.com · reddit.com
Link preview
ROS2 workspace for Borunte BRTIRUS0707A 6DOF arm
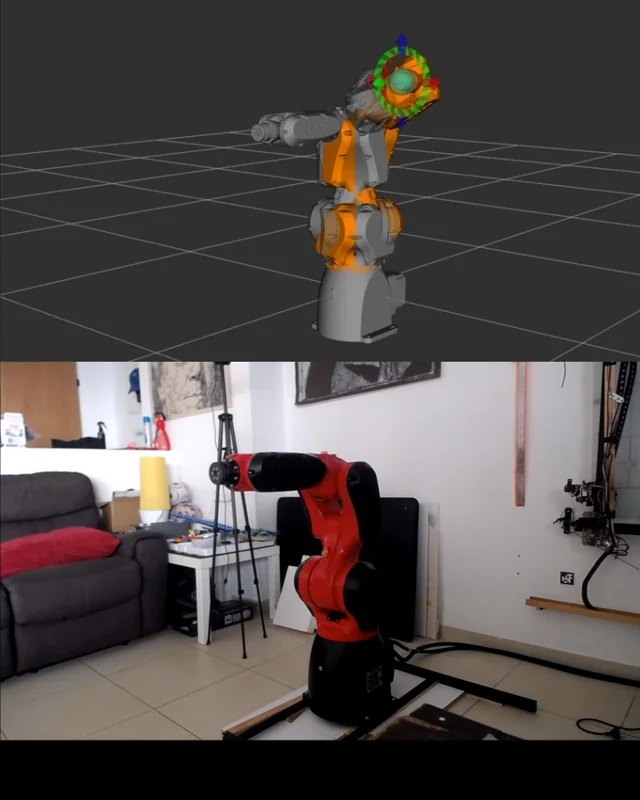
I have a Borunte BRTIRUS0707A 6-axis arm (HC1 controller, F5.2.1 firmware) and there was no ROS 2 support for it, so I created one and put it on GitHub: 👉 https://github.com/rqtqp/ros2_borunte_0707A It's a ROS 2 (Humble) workspace that talks to the controller over its JSON-over-TCP interface (port 9760) — no vendor SDK needed. What works today: Telemetry — live joint state on /joint_states, plus controller status/health. MoveIt 2 motion — Plan + Execute in RViz actually moves the real arm (the bridge turns the planned trajectory into the controller's AddRCC motion command). Safety — dry-run by default, live precondition gate (mode/alarm/limits), soft limits, and a /stop abort service. Model (URDF + meshes) and a MoveIt config included, plus a documented mechanical-zero (groove/blade) home calibration. Sharing it in case it's useful to anyone working with these arms. If you have questions about this piece of equipment (the arm, the HC1 controller, or its remote-command protocol), feel free to ask 🙂 submitted by /u/tru0ne [link] [Kommentare] reddit.com · reddit.com
I have a Borunte BRTIRUS0707A 6-axis arm (HC1 controller, F5.2.1 firmware) and there was no ROS 2 support for it, so I created one and put it on GitHub: 👉 https://github.com/rqtqp/ros2_borunte_0707A It's a ROS 2 (Humble) workspace that talks to the controller over its JSON-over-TCP interface (port 9760) — no vendor SDK needed. What works today: Telemetry — live joint state on /joint_states, plus controller status/health. MoveIt 2 motion — Plan + Execute in RViz actually moves the real arm (the bridge turns the planned trajectory into the controller's AddRCC motion command). Safety — dry-run by default, live precondition gate (mode/alarm/limits), soft limits, and a /stop abort service. Model (URDF + meshes) and a MoveIt config included, plus a documented mechanical-zero (groove/blade) home calibration. Sharing it in case it's useful to anyone working with these arms. If you have questions about this piece of equipment (the arm, the HC1 controller, or its remote-command protocol), feel free to ask 🙂 submitted by /u/tru0ne [link] [Kommentare]
Comments