 Link preview
Target : autonomous robots for mapping
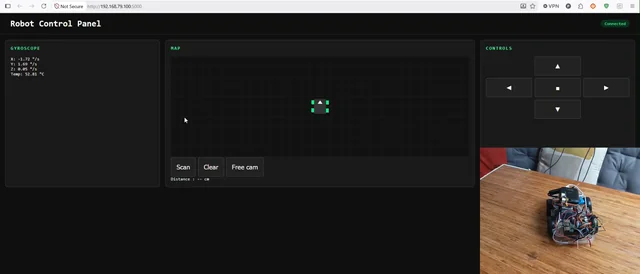
Hi r/robotics ! I’m currently working on a robotic car project for mapping, and I’d like to share my progress and get some feedback from the community. So far, the main issues I’ve encountered (and resolved) are as follows: - Synchronizing the car’s position on the map (as indicated by the gyroscope) with the position of the digitized image based on the car’s position - Managing the motors’ power supply (complex wiring) However, there are still a few issues for which I could use some advice. - It seems that over time, a discrepancy is developing between the robot’s position on the map and its actual position as measured by the gyroscope. Is this an inaccuracy in the gyroscope that could be corrected through code? - The scanner works but remains fairly inaccurate; any recommendations are welcome - The robot’s path tends to veer off course, so I’m considering adding speed encoders to implement a path correction system (I assume the problem stems from the fact that the speed of each motor isn’t always precise) My goal is to build a fully autonomous car capable of mapping its surroundings (I'll add a webcam). Feel free to share any ideas you might have. my target is build a full self driving car able to mapping his environment ( i will adding webcam). Github : https://github.com/enzocolombat/EC-Hub/ submitted by /u/Pasteque9000 [link] [Kommentare] reddit.com · reddit.com
Link preview
Target : autonomous robots for mapping
Hi r/robotics ! I’m currently working on a robotic car project for mapping, and I’d like to share my progress and get some feedback from the community. So far, the main issues I’ve encountered (and resolved) are as follows: - Synchronizing the car’s position on the map (as indicated by the gyroscope) with the position of the digitized image based on the car’s position - Managing the motors’ power supply (complex wiring) However, there are still a few issues for which I could use some advice. - It seems that over time, a discrepancy is developing between the robot’s position on the map and its actual position as measured by the gyroscope. Is this an inaccuracy in the gyroscope that could be corrected through code? - The scanner works but remains fairly inaccurate; any recommendations are welcome - The robot’s path tends to veer off course, so I’m considering adding speed encoders to implement a path correction system (I assume the problem stems from the fact that the speed of each motor isn’t always precise) My goal is to build a fully autonomous car capable of mapping its surroundings (I'll add a webcam). Feel free to share any ideas you might have. my target is build a full self driving car able to mapping his environment ( i will adding webcam). Github : https://github.com/enzocolombat/EC-Hub/ submitted by /u/Pasteque9000 [link] [Kommentare] reddit.com · reddit.com
Hi r/robotics ! I’m currently working on a robotic car project for mapping, and I’d like to share my progress and get some feedback from the community. So far, the main issues I’ve encountered (and resolved) are as follows: - Synchronizing the car’s position on the map (as indicated by the gyroscope) with the position of the digitized image based on the car’s position - Managing the motors’ power supply (complex wiring) However, there are still a few issues for which I could use some advice. - It seems that over time, a discrepancy is developing between the robot’s position on the map and its actual position as measured by the gyroscope. Is this an inaccuracy in the gyroscope that could be corrected through code? - The scanner works but remains fairly inaccurate; any recommendations are welcome - The robot’s path tends to veer off course, so I’m considering adding speed encoders to implement a path correction system (I assume the problem stems from the fact that the speed of each motor isn’t always precise) My goal is to build a fully autonomous car capable of mapping its surroundings (I'll add a webcam). Feel free to share any ideas you might have. my target is build a full self driving car able to mapping his environment ( i will adding webcam). Github : https://github.com/enzocolombat/EC-Hub/ submitted by /u/Pasteque9000 [link] [Kommentare]
Comments