I put together a small ROS 2 subsystem that turns a 2-DOF pan/tilt platform and a cheap 2D LiDAR into a stop-and-capture 3D scanner, and figured it might be useful to someone else here. The setup: two Feetech STS3215 serial-bus servos aim an LDROBOT LD19. A node sweeps the platform and an assembler stacks the 2D scans into a `PointCloud2` using the live TF tree. There's an optional MQTT bridge so an external controller (in my case a microcontroller mission queue on a rover) can trigger scans and get a completion handshake back. It's a *complete* project — it even includes a fix to the LiDAR driver (upstream `ldlidar_stl_ros2` won't build on recent GCC/glibc; the patched fork is linked below). It talks to the rover over a well-defined set of MQTT messages, but every command also has an equivalent ROS 2 topic, so if you want a pure ROS 2 setup you just don't launch the bridge. (Personally I love the MQTT side — it lets me drive the whole thing from a tablet.) No vendor SDK — the Feetech STS/SMS half-duplex protocol is implemented directly over pyserial, including handling the URT-1 adapter's habit of echoing every TX byte back on the RX line (the kind of thing that eats an evening if you don't know it's coming). The assembler is driver-agnostic: it consumes standard `sensor_msgs/LaserScan` on `/scan`, so any conformant 2D LiDAR should work. It's running on an RK3588 today and is built to go headless on a Pi 5. This is the first piece I'm open-sourcing from a larger autonomous rover project, GPL-3.0. I'd genuinely welcome feedback — particularly from anyone who's done multi-LiDAR or TF-timing work, since the scan-to-TF synchronization was the fussiest part to get right. But it does work! Happy to answer questions about any of it. Project: https://github.com/aa2mz/pan\_tilt\_lidar Patched LiDAR driver: https://github.com/aa2mz/ldlidar\_stl\_ros2 submitted by /u/CorrectAir8833 [link] [Kommentare]


At Foxglove, we collaborated with Aditya Kamath, resulting in another blog post in his ROS 2 LeKiwi series, this time covering the integration of SLAM and Nav2. This blog post should be relevant to anyone wanting to integrate Nav2, even if they don't have a holonomic platform. If you find this kind of content useful, let us know, and we will keep it coming! submitted by /u/arewegoing [link] [Kommentare]

Nature: Outplaying elite table tennis players with an autonomous robot (Published: 22 April 2026): https://www.nature.com/articles/s41586-026-10338-5 YouTube Sony AI: Ace vs. Kihara | Pro Match Highlights | Sony AI Table Tennis Robot: https://www.youtube.com/watch?v=TwkDm2H6ft8 From 链上小财女 on 𝕏: https://x.com/Zoozo2025/status/2064998917394374930 submitted by /u/Nunki08 [link] [Kommentare]

I had a first go, putting together some of our friends in the space + a bit of research. It’s inspiring to see this vertical grow while everyone complains Europe is dead in tech. You do not need to live in SF or Shenzen to build with robots. You just need good engineers and a high tolerance for pain. There is lot of heavy metal waiting to wake up in Europe. Cyberwave Mirai Robotics Alto Robotics Fluid Wire Robotics Caracol AM ANYbotics Niulinx NEURA Robotics Generative Bionics Pipein Wearable Robotics Enchanted Tools Flybotix Quantum Systems Wandercraft Voliro Exotec Automata Agreenculture Reactive Robotics Verne EasyMile Inbolt https://preview.redd.it/i1ivxo1r1t6h1.png?width=2220&format=png&auto=webp&s=b49920fd224ce5e23121d673f33a78aa8174cecd Who’s missing? Feel free to tag your venture in the comments. Also: I’ll put the link to the database in the comments if anyone wants to contribute to the map and then I’ll happily publish a v2 🫡 Rough visual made with Claude Code can’t wait to see more logos on it. submitted by /u/Erlapso [link] [Kommentare]
This video demonstrates the general concept that makes a differential wrist joint work. Both motors working together achieve two degrees of freedom. submitted by /u/Icy_Hat_7473 [link] [Kommentare]
Hi everyone, I wanted to share our latest open-access paper published in the journal Robotics: Multi-Objective Intelligent Industrial Robot Calibration Using Meta-Heuristic Optimization Approaches. The Problem Traditional industrial robot calibration heavily focuses on a single goal: maximizing absolute end-effector position accuracy. However, purely optimizing for position errors often results in the algorithm recommending unrealistic, drastic shifts to the robot’s physical kinematic structure (its Denavit–Hartenberg parameters). This creates a stark deviation from the manufacturer's nominal specifications and can degrade performance across different areas of the workspace. Our Approach We framed this challenge as a multi-objective optimization problem to strike a balance between two competing goals: Position Accuracy: Minimizing discrepancies using joint angle readings and a high-precision laser tracker (LT). Kinematic Realism: Minimizing the mean absolute deviation of the calibrated DH parameters from the manufacturer's original design specs. To find the optimal trade-off, we deployed and benchmarked several leading evolutionary and swarm optimization algorithms: NSGA (Nondominated Sorting Genetic Algorithms) MOEA/D (Multi-Objective Evolutionary Algorithm based on Decomposition) MOPSO (Multi-Objective Particle Swarm Optimization) Key Takeaways Utilizing a multi-objective framework prevents overfitting to specific target points and keeps the structural kinematic parameters physically viable. Swarm and evolutionary approaches excel at generating an adaptable Pareto front, giving automation engineers finer control over calibration tradeoffs. The full methodology, mathematical formulations, and comparative results are available to read for free on the MDPI Robotics Publication Page. I would love to hear the community's thoughts on using meta-heuristics for kinematic calibration, or answer any questions you might have about our experimental setup and algorithm performances! submitted by /u/MAK42018 [link] [Kommentare]

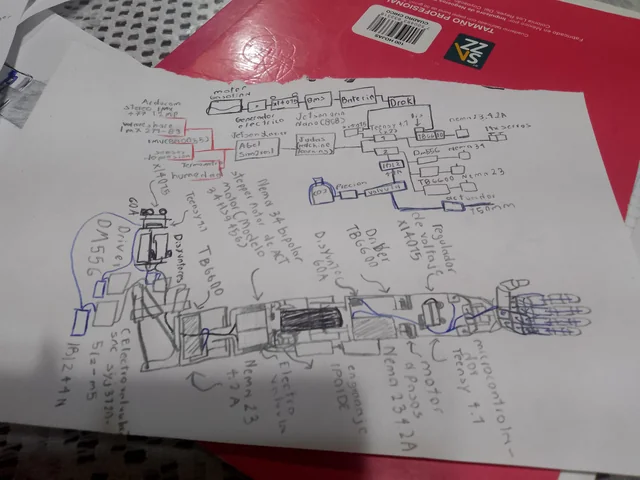
I'm building an autonomous rover using ROS2. For mapping, I'm using SLAM Toolbox, and my goal is to navigate the rover autonomously. My rover uses BLDC hub motors (the type of wheel in the picture) that have built-in hall sensors. However, I'm confused about how to generate the /odom topic required by SLAM Toolbox using these hall sensors. From what I understand, SLAM Toolbox needs odometry data, but I'm not sure: How to convert hall sensor readings into wheel odometry. How to calculate wheel position, velocity, and robot pose from the hall sensor data. Whether hall sensors alone are accurate enough for odometry. If there are any ROS2 packages or existing solutions that can help with this. Has anyone implemented odometry using BLDC hub motor hall sensors in ROS2? Any examples, tutorials, or advice would be greatly appreciated. submitted by /u/Organic-Author9297 [link] [Kommentare]
I made a chapter in my Advanced Robotics course about swarm robotics, focusing on the main ideas behind multi-robot coordination rather than treating it as just a buzzword. The video covers topics like: what makes a robot group a “swarm” decentralized vs. centralized coordination local rules and emergent global behavior examples inspired by ants, birds, and collective systems why scalability and robustness are important in swarm robotics I’m sharing it as a learning resource for students or beginners who are trying to understand where swarm robotics fits inside robotics and multi-agent systems. Video: https://www.youtube.com/watch?v=EXH3NpsKtUc I also keep the related course materials and source codes here, for anyone who prefers to learn by reading or experimenting with code: https://github.com/mohammadijoo/Control_and_Robotics_Tutorials For people working in robotics/control: what topics do you think should be added to make a swarm robotics lecture more useful — communication models, formation control, task allocation, path planning, or real hardware examples? submitted by /u/abolfazl1363 [link] [Kommentare]

No the thumbnail is not fake and shes quite talented would not be surprised if she is in here anyways enjoy —————————————————————————————————————-——————————————————————- submitted by /u/fake_odelay [link] [Kommentare]
I am 16 years old and have absolutely no experience with Linux, and I am looking for a ROS 2 course. While the courses offered by The Construct seem quite comprehensive, I am concerned about some issues others have reported, such as incorrect quizzes, shallow content, or general quality problems. If you have experience with their courses, could you share how it went, or would you recommend other structured courses instead? submitted by /u/Initial_Animator1465 [link] [Kommentare]

What if Playmobil figures were scaled up and equipped with AI, turning them into physical AI companions? It could be fun if their hands kept the classic C shape design but were upgraded with 3or 4 degrees of articulation, allowing them to perform simple tasks. (such as fetching a pen, making tea or coffee, and other basic household activities) The face could be a display screen. When powered off, it would show the classic Playmobil eyes and smile. Once activated, it would come to life with expressive eyes and facial animations similar to the characters in , allowing it to move and interact more naturally. What do you think? submitted by /u/Difficult-Limit-7551 [link] [Kommentare]