Channels

The Seeed team will be in Garching-Hochbrück near Munich tomorrow for a hands-on workshop with reBot Arm, our fully open-source robotic arm. Try it in person, ask technical questions, meet robotics folks, and grab some pizza with us. Limited spots: https://www.eventbrite.co.uk/e/robotics-builders-meetup-hands-on-with-rebot-arm-tickets-1990578698472 submitted by /u/MiuoChar [link] [Kommentare]

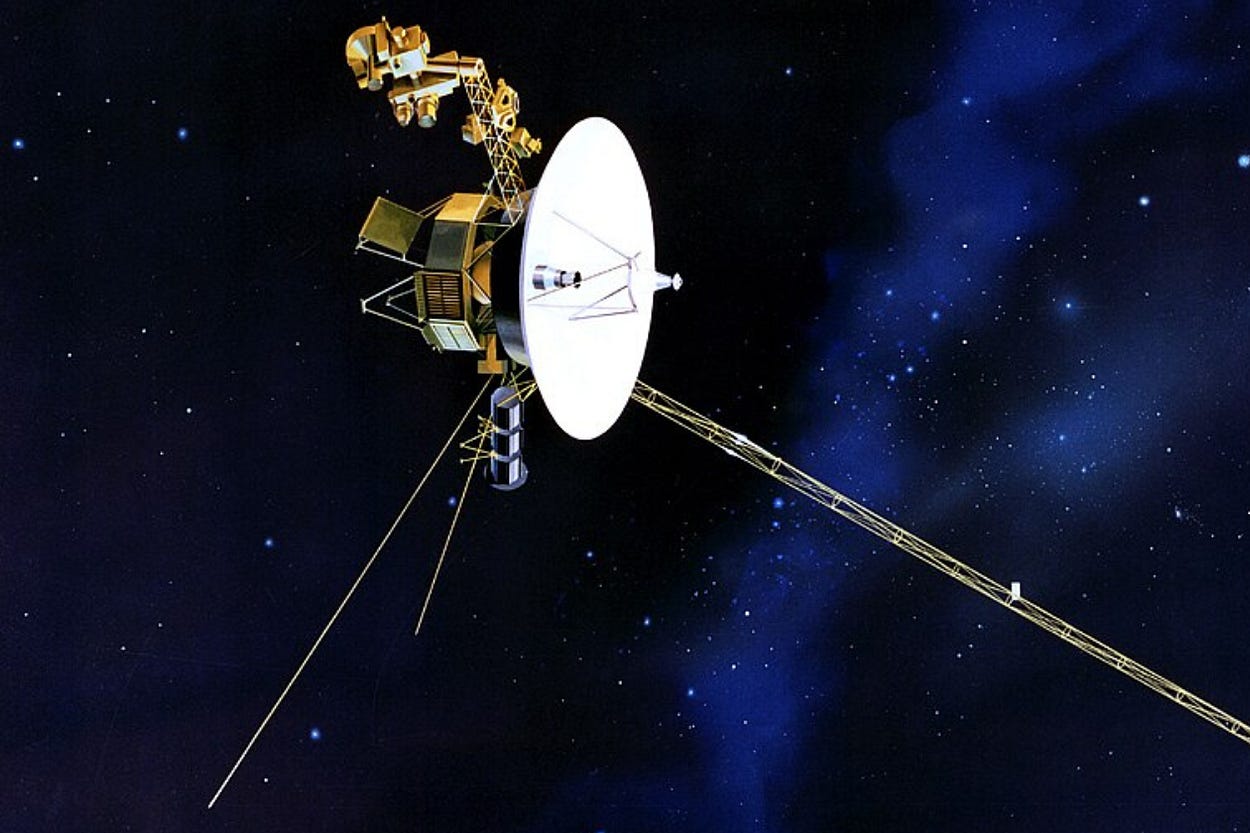
Sorry for the slow pace of the video, but I figured that seeing each visualizer perform the same path makes them more intuitive. All of these visualizers are rendered on a meta quest 3 using OpenXR. submitted by /u/RoboLord66 [link] [Kommentare]



Bundle your digital files, set a price, and share one link. Buyers see blurred previews until they pay. Free to start — no monthly fees.
On 3 December 1992, in a Vodafone office west of London, a 22-year-old British software engineer named Neil Papworth sat at a desktop computer terminal, typed “Merry Christmas” using full words rather than the now-conventional abbreviations, and pressed send. The message travelled through the Vodafone cellular network and arrived seconds later on a four-and-a-half-pound Orbitel […]

Welcome to Cambridge Core

James "Weston" Higginbotham went missing one week ago while on a family vacation in Japan.
Multimodal Large Language Models (MLLMs) have made substantial progress in egocentric video understanding, but their ability to reason cooperatively from multiple embodied viewpoints remains largely unexplored. We study this problem through multi-robot cooperative dynamic spatial reasoning, where a model must answer spatial, temporal, visibility, and coordination questions by integrating synchronized egocentric videos from a team of moving robots. To support this setting, we introduce CoopSR, the first benchmark for this task, together with EgoTeam, a multi-robot egocentric QA dataset. EgoTeam contains 114,227 QA pairs spanning 19 question types, four difficulty tiers, and three team sizes in Habitat and iGibson, along with a real-world test set of around 2,326 QAs collected using two quadruped robots. We further propose SP-CoR (Spectral and Physics-Informed Cooperative Reasoner), an MLLM framework for fine-grained cooperative spatial reasoning. SP-CoR combines dynamics-aware multi-robot frame sampling, spectral- and physics-guided view fusion, and physics-aligned prompt distillation, enabling the model to benefit from privileged robot-pose supervision during training while requiring only egocentric videos at test time. Across 22 MLLM baselines, SP-CoR consistently improves cooperative reasoning, outperforming the strongest fine-tuned baseline by +3.87% on Habitat and +7.12% on iGibson. It also shows stronger generalization to unseen team sizes and real-world robot tests. Code can be found at https://github.com/KPeng9510/seeing-together.git.
A new series on learning AI, from the ground up

I’ve been experimenting with different approaches to running code in a sandbox for several years now, but my latest attempt feels like it might finally have all of the characteristics …
AI as a centralizing technology
Compare cost of living across 1,003 cities in 174 countries. Rent, food, transport, utilities, and salaries — normalized to USD and refreshed regularly.