Just a quick demo to see how fast my hand is! I started with a baseline 5 second, finger-to-thumb opposition cycle and increased the speed until the fingers started to lose contact. The pinky starts to lose contact with the thumb at around 12x and the rest of the fingers barely make contact at 14x and beyond. Having the fingers be tendon driven does help a good bit in reducing inertia to get these max achievable speeds. Although, I'm not sure there's even a good reason to be moving this fast.. submitted by /u/qualitygui [link] [Kommentare]


I have been planning this for a while now. It's basically a youtube live stream where we learn robotics concepts together, ask each other doubts, discuss, make weird robots, some shinaneigens and most importantly just have fun. You can choose to not show your face, or vtube like me. Right now I have started learning the physics behind robotics using a book called Modern robotics by Kevin lynch and Frank Park. You can either learn it with me(I have only seen a couple of pages, I can teach you in like 20 min to get you to where I am) or if you want you can choose to just do your own thing simultaneously as well. Any suggestions or feedback to get as many people as we can is appreciated 👍 I really want to make the robotics community to become friendly and fun . Just dm me . we'll plan exactly how to undertake this (let's say a discord call in the stream or chat based etc.) submitted by /u/SundeepKuPanigrahi [link] [Kommentare]
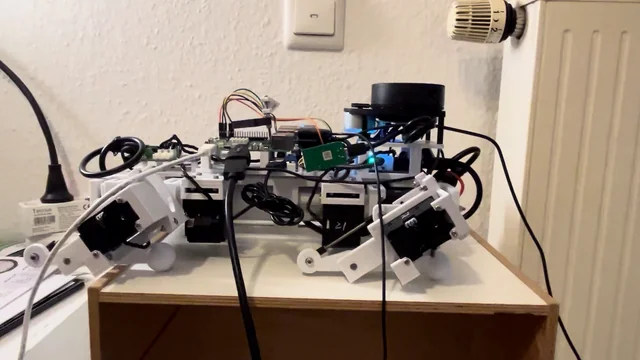
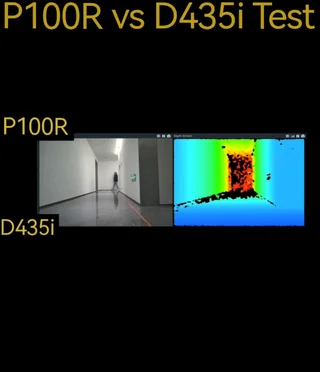
Honestly, I don't know how other people can do IMU balancing so elegantly; my PID oscillates like it's on life support. I have been tuning the PID the whole night, but then again, I don't have a lot of experience other than following some manuals, so any advice would be great! I am using BNO055 for IMU. Work in progress GitHub: https://github.com/SphericalCowww/CubicDoggo_06R Original Cubic Doggo: https://github.com/SphericalCowww/CubicDoggo submitted by /u/SphericalCowww [link] [Kommentare]
Just a machine that made you stop and think: "wow...somebody put a ridiculous amount of engineering into this". Could be anything.sometimes the most impressive machines are the ones that make incredibly difficult things look effortless. submitted by /u/hannimalki [link] [Kommentare]


I would love feedback on the data quality and the 3D renderings specifically, because the renderings were the hardest part about getting this to work. Basically, Chaveta is a agentic dataset curation tool that allows you to submit a prompt and instantly receive a dataset for: - World models - Robotics (JSON Trajectories) - LLM Fine Tuning - Geological - Synthetic Tool Calling / LLM flows - Time series For the robotics path, you can also download to MCAP or simple JSON and we have a render tab that allows you to edit joints visually + we provide copy/paste scripts for importing the dataset into things like Transformers. Let me know what you think. submitted by /u/ComradePampers [link] [Kommentare]
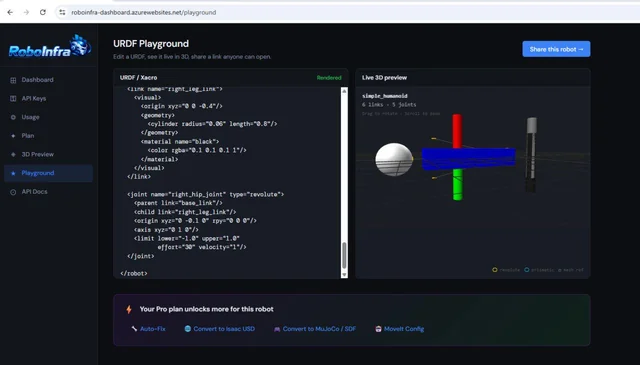
Hi everyone, I've been working on a browser-based URDF playground aimed at making robot development a bit easier. Steps: i) Paste URDF or Xacro directly into the browser ii) Instant 3D visualization iii) Shareable robot links iv) No ROS installation required Playground: https://roboinfra-dashboard.azurewebsites.net/playground Additional tooling: URDF/Xacro validation Auto-fix suggestions URDF → SDF conversion URDF → MJCF conversion URDF → USD conversion MoveIt configuration generation Mesh analysis GitHub Action integration Python SDK The goal is to make robotics workflows feel a little more like modern web development—open a browser, paste your robot description, and start iterating immediately. I'd really appreciate feedback from ROS, MoveIt, Isaac Sim, MuJoCo, and general robotics developers: What feature would make this genuinely useful in your workflow? What is currently missing from existing URDF tools? Any issues or suggestions after trying it? Thanks! submitted by /u/DateRealistic5066 [link] [Kommentare]
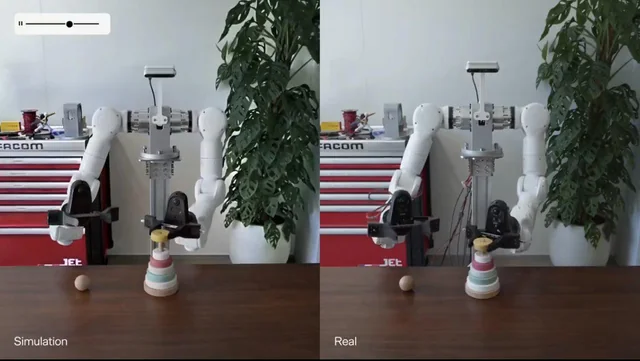
The Genesis sim video got me thinking: what does it actually take to build scenes like that (apart from gaussian splat part) with such accuracy, at scale? Asset and scene generation is one of the biggest bottlenecks in robot training. NVIDIA GR00T, Helix, HumanPlus, and ASAP all show the same pattern: more diverse scenarios lead to better sim-to-real transfer. But generating physically accurate objects and scenes takes time. Four platforms are working on this in 2026. Here's how they compare: 1. Rigyd: Agentic pipeline, best for on-demand scale and new types of objects Takes raw 3D (.glb, .fbx, .obj), images, or text and outputs calibrated OpenUSD + MJCF in ~2 minutes per asset with SimReady asset validator baked in. Generates full interactable scenes with per-object decomposition. Native Isaac Sim and MuJoCo support. Non-rigid and articulated objects are stated in the roadmap. The pipeline is agentic end-to-end, so no per-asset manual work. Good fit for teams that need to move fast with on-demand assets. 2. Lightwheel: High fidelity articulated objects, SimReady catalog Strong catalog of high-fidelity articulated assets and a SimReady library used by large enterprise customers. Per-asset visual and physical quality is high. USD and MJCF support via open-source converters. Good fit if you need a curated, validated catalog. Less flexible for new use cases or object categories outside their existing library. Catalog growth follows a curation model rather than an agentic pipeline. 3. NVIDIA Edify: Generative 3D, physics added separately Generates high-quality 3D meshes from text or image in under 2 minutes. Trained on licensed data, enterprise-safe. Tight Omniverse integration. The gap: it produces visual geometry, not SimReady assets. Physics, collision geometry, and USDPhysics schemas need to be added downstream before the asset is usable for robot training. Works well as an upstream step paired with a SimReady pipeline. 4. Moonlake: World modeling agent approach Acts directly inside Blender, automating the creation of articulated assets, physics-validated scenes, and complex environments rather than per-asset annotation. The approach is promising for research but production-grade Isaac Sim / MuJoCo integration is not there yet. If successful, world models could collapse scene generation and policy training into a single learning loop. What I think actually matters for sim-to-real transfer (ranked by impact): Per-object physics accuracy within the domain-randomization band Scene diversity (variation of scenes the policy sees during training) Visual fidelity (matters most for camera-only policies, less for contact-rich manipulation) How to choose: Need to scale across many object categories fast → Rigyd Need a validated catalog of articulated assets for known use cases → Lightwheel Need high-quality visual 3D in the NVIDIA ecosystem and will add physics downstream → Edify Researching end-to-end learned simulation → Moonlake For most teams the practical pattern is Rigyd for the long tail + hand-authored or Lightwheel assets for the few hero objects your scenario depends on. Both output standard OpenUSD/MJCF so they compose cleanly. Questions for the community: What's missing from this comparison? For those running training: where does asset prep actually bottleneck you? Image Credit: Genesis AI submitted by /u/yektabasak [link] [Kommentare]