Channels
The world's least efficient way to enter a code. Aim the cannon, drop balls through the pegs, and land all six letters in their slots.
As the Homebrew Computer Club met and MITS frantically shipped Altairs, researchers at Xerox PARC were seemingly a decade or more ahead. They already knew what would make personal computers useful, and researchers were working on an ecosystem to support a typical office task. Writing and printing documents. Gary Starkweather

A walkthrough of the rewritten AF_UNIX garbage collector, the CVE-2025-40214 scc_index uninitialised-field bug, and two reproducers.
Last month Terry Godier published a great essay on his website about “the boring internet,” discussing how the internet that many of us grew up with, the wonderful, empowering, exciting…

AI-driven framework creates defect-tolerant materials with complex functionality
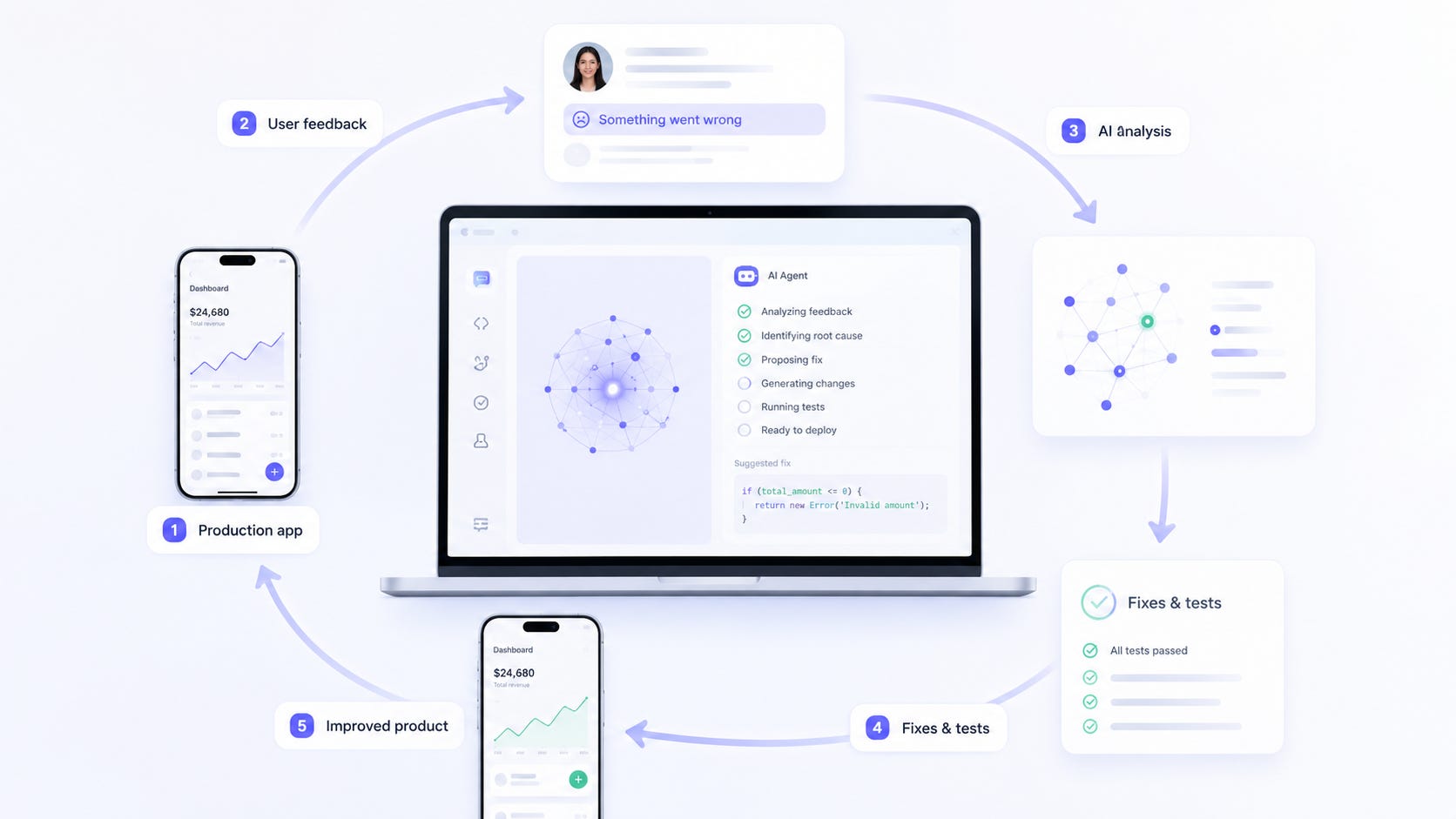
An end-to-end look at closing the AI coding agent loop: connecting production errors, user feedback, screenshots, logs, and product traceability so an agent can improve a real app from live production context.
Modern Debian and Linux 6.6 bring-up for the Google Nexus Q.
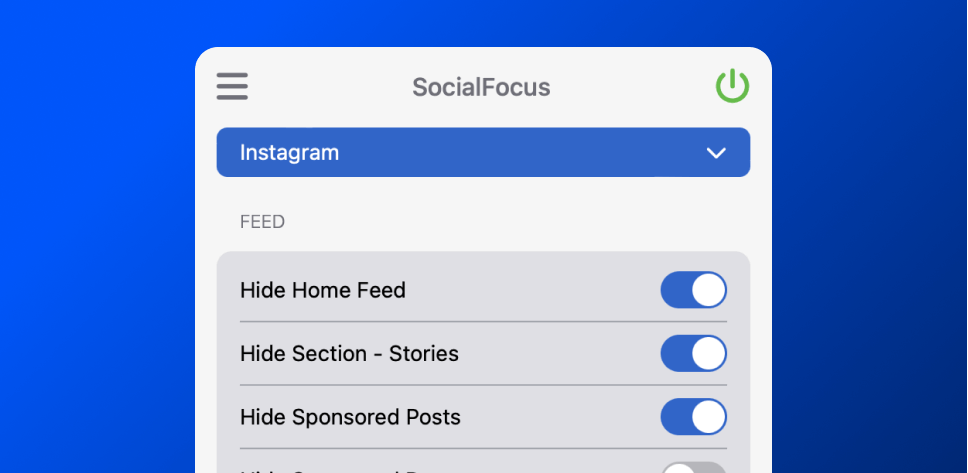
Why scrolling gets harder to resist during exam prep, and three extensions that remove the feed but keep the platform.
An obsidian plugin for uploading local images embedded in markdown to remote store and export markdown for publishing to static site. - addozhang/obsidian-image-upload-toolkit

For months now, Congress has been kicking the ball down the road—temporarily postponing the expiration of the mass surveillance authority Section 702 of FISA in hopes that some consensus could be reached. Now, with the deadline looming, the stakes have never been higher. Nearly every time the...
Lookin' at you, JSON

I designed and made a fully open-source mobile robotics platform for my robot arm, making it a whole robotics manipulator platform. The arm has 5 degrees of freedom, and the platform is 4WD with differential steering. The plan is to upgrade to mecanum wheels in the future. Current electronics are an NXP FRDM board controlling everything over WiFi, with an L298N Motor driver for the platform and off-the-shelf servo motors by DFROBOT. The idea was to use components that are easily available and easy to use! The plan is to continue working on it and upgrading it! submitted by /u/milosrasic98 [link] [Kommentare]

