Channels
im just making this post to see if anyone else using a ledger hardware wallet is unable to connect and sign trasactions on desktop with rabby on google chrome on the 18th i contacted their support through their discord / github but i havent received any proper update other than have i tried to contact google chrome support which i thought was a stupid question and still now it doesnt work just wanted to see if im on my own with this issue my ledger works fine and allows me to connect / sign using rabby on other browsers / wallets but only shits the bed with chrome. submitted by /u/Sam_Loopring_eth [link] [Kommentare]
Any one in New York City that wants to build robot let me know you have to be a super nerd and a hobbyist Thank you submitted by /u/BirdAccording7249 [link] [Kommentare]
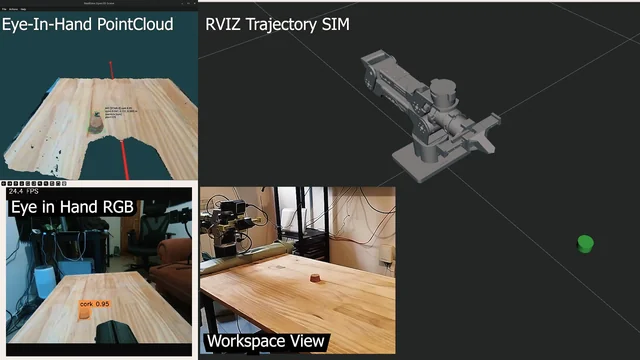
Another working step in my robotics pipeline! It detects the object with a finetuned YOLOv26, deprojects the RGB-D mask into a 3D point cloud, estimates the object position, sends the target to MoveIt, checks IK solver, plans the trajectory in RViz, and executes the motion on the robot before picking it. (next step!) If the object is moved, the target updates and the robot plans again. submitted by /u/nettrotten [link] [Kommentare]

Inflation, like fiat, is a killer for many crypto assets. #cryptocurrency submitted by /u/Hedge_me [link] [Kommentare]
I have been in crypto space since 2018. I saw many OGs at that time quit. Never feel disappointed like now. Even in last bear market when btc hits 10k, I'm still opptimistic. I'm still holding but I'm not buying dip. With the same money, I would rather put into AI stock and hold another 3 years. submitted by /u/Yike_Pp [link] [Kommentare]

Following up on my last post about this robot project (which I'm currently working on with a Raspberry Pi)—I thought I'd share an update on the project's progress, since I ran into a problem that took me a bit of research to figure out, and I was also able to reflect on it thanks to the very valuable feedback I received. (https://www.reddit.com/r/raspberry_pi/s/eCKPFWwPhk) The issue While testing the 4 DC motors from the web interface, I noticed something off: sometimes the robot would suddenly lurch forward at full speed when I'd only tapped a key once, and other times there'd be a noticeable delay between pressing a key and the motor actually responding. Not a one-off glitch — happening often enough that I couldn't trust the controls. What was actually going on After digging into it, the culprit was the PWM signal I was using to control motor speed. I was using RPi.GPIO's software PWM, which relies on a Python thread toggling the pin at precise intervals to simulate the signal. The problem is that thread has to compete for CPU time with everything else my server is doing — streaming gyroscope data 20 times a second, running the radar scan, handling Flask/SocketIO requests. When the Pi got momentarily busy, the PWM timing would drift, which explains both symptoms: a duty cycle spike (sudden full-speed lurch) or a delayed update (the motor not getting the new speed in time). The fix Switched to pigpio, which runs as a separate daemon (pigpiod) in the background. Instead of my Python code generating the PWM signal itself, it just sends simple commands to this daemon, which handles the actual signal generation independently of whatever else the Pi is doing. So far the difference is noticeable — no more random speed spikes during testing. The other thing I added: a watchdog Separately, I realized there was a bigger risk I hadn't addressed: the robot is controlled entirely over WiFi through a browser. If the connection drops for any reason while it's moving forward, there was nothing stopping it from just... continuing toward whatever's in front of it. So I added a watchdog thread on the server side — it tracks the timestamp of the last command received, and if more than 500ms pass without a new one, it force-stops the motors automatically. Independent safety net, regardless of what causes the disconnect (WiFi hiccup, browser crash, whatever). what I plan to do next Mechanical redesign: dropping from 4 driven wheels to 2 front-driven wheels + a rear caster wheel, mainly to simplify trajectory control (the 4-wheel setup made it hard to drive perfectly straight) Mounting HC-020K encoders on the front wheels for actual odometry instead of relying purely on the gyroscope (which drifts over time) Eventually fusing gyro + encoder data to get a stable heading estimate Repo's here if you want to poke around: https://github.com/enzocolombat/EC-Hub Genuinely curious what people think of the pigpio + watchdog approach — is there a cleaner way to handle the real-time PWM issue I'm missing? And for anyone who's done the encoder + gyro fusion thing on a budget robot, would love to hear how you approached it before I dive in. submitted by /u/Pasteque9000 [link] [Kommentare]
Hi everybody! I try to upload image of Mai trading history if you see it here I have been shorting small crypto coins that pump hard and then they dump. This has been working good so far the last 4 months with around 300 trades. I wanted to add some more confirmations and therefore asking you if you have any ideas what I can add? If there is some indicator about bag holders selling or tape reading from all crypto exchanges combined? submitted by /u/Traditional-Judge-32 [link] [Kommentare]

This is just a casual topic. It’s clear that you should stick with BTC and maybe some of the major alts like SOL, etc... But sometimes I like to look at the charts and think, “It’s a shame I didn’t buy back then, before those massive 50x gains,” hahaha. Do you have your hopes pinned on any particular coin for huge gains like that? Sure, it’s just dreaming, but why not? submitted by /u/dannyxdii [link] [Kommentare]



