Results are almost here. Good luck to everyone waiting for the final decision 🙂 submitted by /u/Sea_Muscle_4281 [link] [Kommentare]

https://preview.redd.it/wsq4fyhpzr6h1.png?width=745&format=png&auto=webp&s=7ade94f5852667bf6a820398e3fcf8dcb0d450af submitted by /u/HitarthSurana [link] [Kommentare]
This video demonstrates the general concept that makes a differential wrist joint work. Both motors working together achieve two degrees of freedom. submitted by /u/Icy_Hat_7473 [link] [Kommentare]
“…5 papers at ICML (1 Spotlight)…” “…Five ICML papers is what a strong PhD produces in four years. I did it in five months…” I recently saw these posts from people at the same AI company. At first, I was extremely surprised. It turned out they were workshop papers. Am I missing something here, or are workshop papers now being treated as equivalent to main-track papers? submitted by /u/Terrible-Chicken-426 [link] [Kommentare]
Hi everyone, I wanted to share our latest open-access paper published in the journal Robotics: Multi-Objective Intelligent Industrial Robot Calibration Using Meta-Heuristic Optimization Approaches. The Problem Traditional industrial robot calibration heavily focuses on a single goal: maximizing absolute end-effector position accuracy. However, purely optimizing for position errors often results in the algorithm recommending unrealistic, drastic shifts to the robot’s physical kinematic structure (its Denavit–Hartenberg parameters). This creates a stark deviation from the manufacturer's nominal specifications and can degrade performance across different areas of the workspace. Our Approach We framed this challenge as a multi-objective optimization problem to strike a balance between two competing goals: Position Accuracy: Minimizing discrepancies using joint angle readings and a high-precision laser tracker (LT). Kinematic Realism: Minimizing the mean absolute deviation of the calibrated DH parameters from the manufacturer's original design specs. To find the optimal trade-off, we deployed and benchmarked several leading evolutionary and swarm optimization algorithms: NSGA (Nondominated Sorting Genetic Algorithms) MOEA/D (Multi-Objective Evolutionary Algorithm based on Decomposition) MOPSO (Multi-Objective Particle Swarm Optimization) Key Takeaways Utilizing a multi-objective framework prevents overfitting to specific target points and keeps the structural kinematic parameters physically viable. Swarm and evolutionary approaches excel at generating an adaptable Pareto front, giving automation engineers finer control over calibration tradeoffs. The full methodology, mathematical formulations, and comparative results are available to read for free on the MDPI Robotics Publication Page. I would love to hear the community's thoughts on using meta-heuristics for kinematic calibration, or answer any questions you might have about our experimental setup and algorithm performances! submitted by /u/MAK42018 [link] [Kommentare]
Are there any websites listing post-doc job opening in machine learning? Currently I'm using LInkedIn to search for these. When I was a math post-doc, everyone used "MathJobs.org" to find jobs. Is there a similar website for machine learning? Thanks. submitted by /u/random_sydneysider [link] [Kommentare]

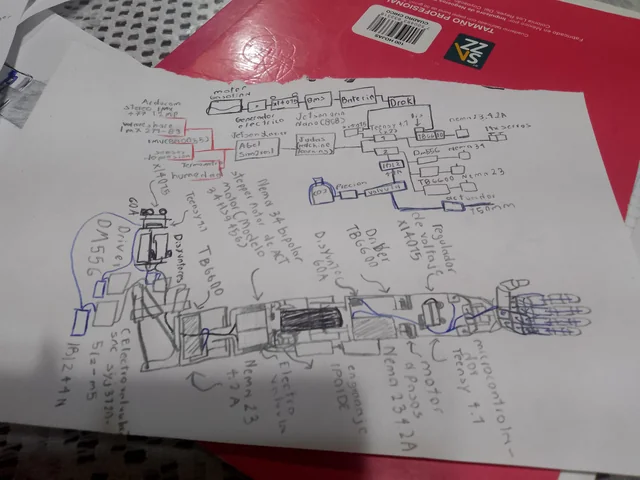
I'm building an autonomous rover using ROS2. For mapping, I'm using SLAM Toolbox, and my goal is to navigate the rover autonomously. My rover uses BLDC hub motors (the type of wheel in the picture) that have built-in hall sensors. However, I'm confused about how to generate the /odom topic required by SLAM Toolbox using these hall sensors. From what I understand, SLAM Toolbox needs odometry data, but I'm not sure: How to convert hall sensor readings into wheel odometry. How to calculate wheel position, velocity, and robot pose from the hall sensor data. Whether hall sensors alone are accurate enough for odometry. If there are any ROS2 packages or existing solutions that can help with this. Has anyone implemented odometry using BLDC hub motor hall sensors in ROS2? Any examples, tutorials, or advice would be greatly appreciated. submitted by /u/Organic-Author9297 [link] [Kommentare]
I made a chapter in my Advanced Robotics course about swarm robotics, focusing on the main ideas behind multi-robot coordination rather than treating it as just a buzzword. The video covers topics like: what makes a robot group a “swarm” decentralized vs. centralized coordination local rules and emergent global behavior examples inspired by ants, birds, and collective systems why scalability and robustness are important in swarm robotics I’m sharing it as a learning resource for students or beginners who are trying to understand where swarm robotics fits inside robotics and multi-agent systems. Video: https://www.youtube.com/watch?v=EXH3NpsKtUc I also keep the related course materials and source codes here, for anyone who prefers to learn by reading or experimenting with code: https://github.com/mohammadijoo/Control_and_Robotics_Tutorials For people working in robotics/control: what topics do you think should be added to make a swarm robotics lecture more useful — communication models, formation control, task allocation, path planning, or real hardware examples? submitted by /u/abolfazl1363 [link] [Kommentare]

No the thumbnail is not fake and shes quite talented would not be surprised if she is in here anyways enjoy —————————————————————————————————————-——————————————————————- submitted by /u/fake_odelay [link] [Kommentare]
Dear Folks, I have created multiple content on Machine Learning(work in progress), and they are free. I am a data scientist and a post grad degree holder in AI/ML from IIT. To help the machine learning community with important Machine Learning Concepts, I have created multiple long form videos, and structured topicwise digestible contents structured as playlists for learning. If you go through the first two playlists: Introductory Machine Learning Concepts Probability Foundations: Univariate Models You might find helpful content, I have tried explaining with intuitions, derivations, and this is work in progress. For code implementations, scikit learn website has great content on them as well. In total they have 60+ topicwise videos so far, and I think they have the potential to help folks a lot in starting with concepts, or getting with mathematical concepts, or whether you are preparing for an AI/ML/Data job interviews etc. When I sat for my interviews, I was grilled on my project, but majority of questions from my project tested more on foundational concepts and there know how’s. These are FREE content on youtube. This is for the benefit of the learning community. Link: https://youtube.com/@aayushsugandh4036?si=w5MKORU2fWzLRrAJ submitted by /u/Negative_War_65 [link] [Kommentare]

Dear Folks, I have created multiple content on Machine Learning(work in progress), and they are free. I am a data scientist and a post grad degree holder in AI/ML. To help the machine learning community with important Machine Learning Concepts, I have created multiple long form videos, and structured topicwise digestible contents structured as playlists for learning. If you go through the first two playlists: Introductory Machine Learning Concepts Probability Foundations: Univariate Models You might find helpful content, I have tried explaining with intuitions, derivations, and this is work in progress. For code implementations, scikit learn website has great content on them as well. In total they have 60+ topicwise videos so far, and I think they have the potential to help folks a lot in starting with concepts, or getting with mathematical concepts, or whether you are preparing for an AI/ML/Data job interviews etc. When I sat for my interviews, I was grilled on my project, but majority of questions from my project tested more on foundational concepts and there know how’s. These are FREE content on youtube, and hope it benefits and helps the ML community. submitted by /u/Negative_War_65 [link] [Kommentare]
I use Claude Code, Codex CLI, OpenCode, Cline, Cursor, and Amp enough to notice a pattern in how they handle long context. They are all converging on layered progressive compression, but they disagree on what to protect. Most protect recent user messages as a first-class asset. That makes sense. The user said it, which is the source of truth. Most also protect tool outputs that carry state. What surprised me was how differently they treat old assistant messages. Artifacts keeps recent tool calls verbatim but drops older context aggressively. Cursor starts pruning earlier design decisions once the window gets full. Codex CLI lets the model itself decide what to keep in the summary tier. The other axis is transparency. Do you tell the model it was compressed? Some systems silently replace old tool results with a placeholder, which means the model is reasoning under the illusion that it never happened. Others make it explicit: "the previous 40 tool calls are summarized below." I lean explicit because the model needs to know its own context was degraded. Verdents agent loop uses a similar tiered approach: snip first, prune second, summarize last, and a hard red line that protects user messages, stateful tool outputs, and anything the user explicitly flagged. The tradeoff is cost vs accuracy. Aggressive compression saves tokens but degrades the plan. Under-compression hits the window and causes context rot. submitted by /u/Direct_Band896 [link] [Kommentare]