Channels
Best free online tool to resize and compress photos and signatures for Indian government exams (UPSC, SSC, IBPS, NEET, GATE) to exact dimensions. 100% private, secure & instant.
MCP server for Claude: molecule names or SMILES → publication-style 2D structure drawings (PNG/SVG, offline via RDKit), reaction schemes, curved-arrow mechanisms and schematic spectra. Optional Che...
Introducing a new AI model with next-gen ethical alignment. Chat now.

...

Cruz/Wyden bill would help Americans sue federal officials over censorship.

Find what your AI agent gets wrong — before you have a rubric. Qualitative eval for PMs. - aws-samples/sample-GEDD
Agents' Last Exam evaluates AI agents on long-horizon professional workflows with verifiable outcomes across industries such as finance, robotics, bioinformatics, media, and more.
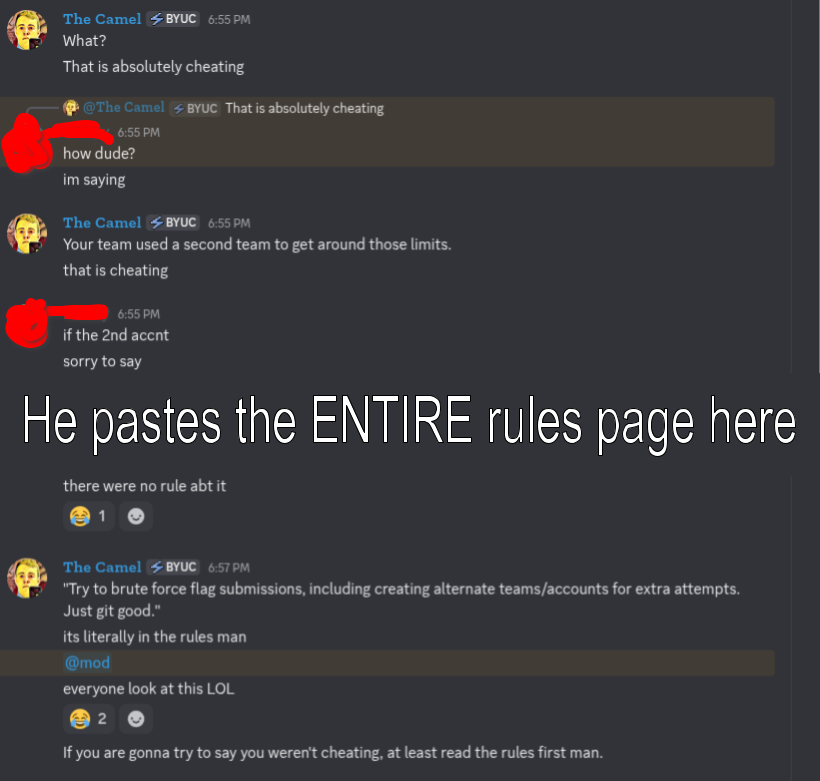
A post-mortem on cheating, AI slop, the slow death of competitive CTFs, and a short analysis on the pitfalls of CTF challenge design.
DeFi smart-contract risk assessment reports
Hi everyone, I wanted to share our latest open-access paper published in the journal Robotics: Multi-Objective Intelligent Industrial Robot Calibration Using Meta-Heuristic Optimization Approaches. The Problem Traditional industrial robot calibration heavily focuses on a single goal: maximizing absolute end-effector position accuracy. However, purely optimizing for position errors often results in the algorithm recommending unrealistic, drastic shifts to the robot’s physical kinematic structure (its Denavit–Hartenberg parameters). This creates a stark deviation from the manufacturer's nominal specifications and can degrade performance across different areas of the workspace. Our Approach We framed this challenge as a multi-objective optimization problem to strike a balance between two competing goals: Position Accuracy: Minimizing discrepancies using joint angle readings and a high-precision laser tracker (LT). Kinematic Realism: Minimizing the mean absolute deviation of the calibrated DH parameters from the manufacturer's original design specs. To find the optimal trade-off, we deployed and benchmarked several leading evolutionary and swarm optimization algorithms: NSGA (Nondominated Sorting Genetic Algorithms) MOEA/D (Multi-Objective Evolutionary Algorithm based on Decomposition) MOPSO (Multi-Objective Particle Swarm Optimization) Key Takeaways Utilizing a multi-objective framework prevents overfitting to specific target points and keeps the structural kinematic parameters physically viable. Swarm and evolutionary approaches excel at generating an adaptable Pareto front, giving automation engineers finer control over calibration tradeoffs. The full methodology, mathematical formulations, and comparative results are available to read for free on the MDPI Robotics Publication Page. I would love to hear the community's thoughts on using meta-heuristics for kinematic calibration, or answer any questions you might have about our experimental setup and algorithm performances! submitted by /u/MAK42018 [link] [Kommentare]

I'm building an autonomous rover using ROS2. For mapping, I'm using SLAM Toolbox, and my goal is to navigate the rover autonomously. My rover uses BLDC hub motors (the type of wheel in the picture) that have built-in hall sensors. However, I'm confused about how to generate the /odom topic required by SLAM Toolbox using these hall sensors. From what I understand, SLAM Toolbox needs odometry data, but I'm not sure: How to convert hall sensor readings into wheel odometry. How to calculate wheel position, velocity, and robot pose from the hall sensor data. Whether hall sensors alone are accurate enough for odometry. If there are any ROS2 packages or existing solutions that can help with this. Has anyone implemented odometry using BLDC hub motor hall sensors in ROS2? Any examples, tutorials, or advice would be greatly appreciated. submitted by /u/Organic-Author9297 [link] [Kommentare]
I made a chapter in my Advanced Robotics course about swarm robotics, focusing on the main ideas behind multi-robot coordination rather than treating it as just a buzzword. The video covers topics like: what makes a robot group a “swarm” decentralized vs. centralized coordination local rules and emergent global behavior examples inspired by ants, birds, and collective systems why scalability and robustness are important in swarm robotics I’m sharing it as a learning resource for students or beginners who are trying to understand where swarm robotics fits inside robotics and multi-agent systems. Video: https://www.youtube.com/watch?v=EXH3NpsKtUc I also keep the related course materials and source codes here, for anyone who prefers to learn by reading or experimenting with code: https://github.com/mohammadijoo/Control_and_Robotics_Tutorials For people working in robotics/control: what topics do you think should be added to make a swarm robotics lecture more useful — communication models, formation control, task allocation, path planning, or real hardware examples? submitted by /u/abolfazl1363 [link] [Kommentare]