Channels
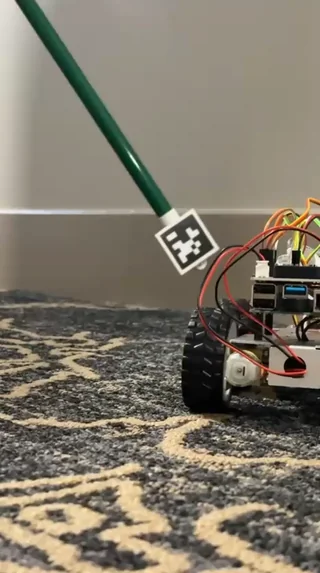
Been working on a PiCar-X build on a Raspberry Pi 4B. v1 goal: detect an AprilTag (36h11 family, ID 0), steer toward it with a PID controller, drive forward, and stop at a configured distance threshold. Toggle it on from a browser dashboard, 3-second countdown, and it goes. I built this entirely with Claude Code. It’s been a massive productivity boost while balancing a full-time job, and the process of building agentically has been a great learning experience. WebSocket concurrent send corruption The broadcast coroutine and the sensor push loop were both calling send_json() concurrently. At await boundaries they interleaved, Starlette threw, and the client was silently dropped from the send set — meaning the toggle-off confirmation never arrived and the button stayed stuck in active state even after the car stopped. Fixed by replacing the shared client set with a per-connection asyncio.Queue and a single drain task per connection. Camera color inversion that didn't respond to the obvious fixes BGR888 didn't fix it. RGB888 + cvtColor didn't fix it either. Root cause: capture_array() on this Pi hardware returns RGB regardless of the format name, and this platform's libjpeg encodes from RGB input correctly without any conversion. One-line fix once the actual data layout was confirmed via a frame diagnostic log. Had to fully remove Vilib It uses a Picamera2 internal API (allocator) removed in 0.3.36 — crashes on any camera restart after a chase session. Server now owns Picamera2 directly for the full session lifetime. What's next v2 candidates on the list: distance-proportional speed, latching stop behavior, camera tilt tracking, and operator override during chase. Stack: Raspberry Pi 4B · PiCar-X v2.0 · Picamera2 · pupil-apriltags · FastAPI · Python 3.13 submitted by /u/okineedaplan [link] [Kommentare]
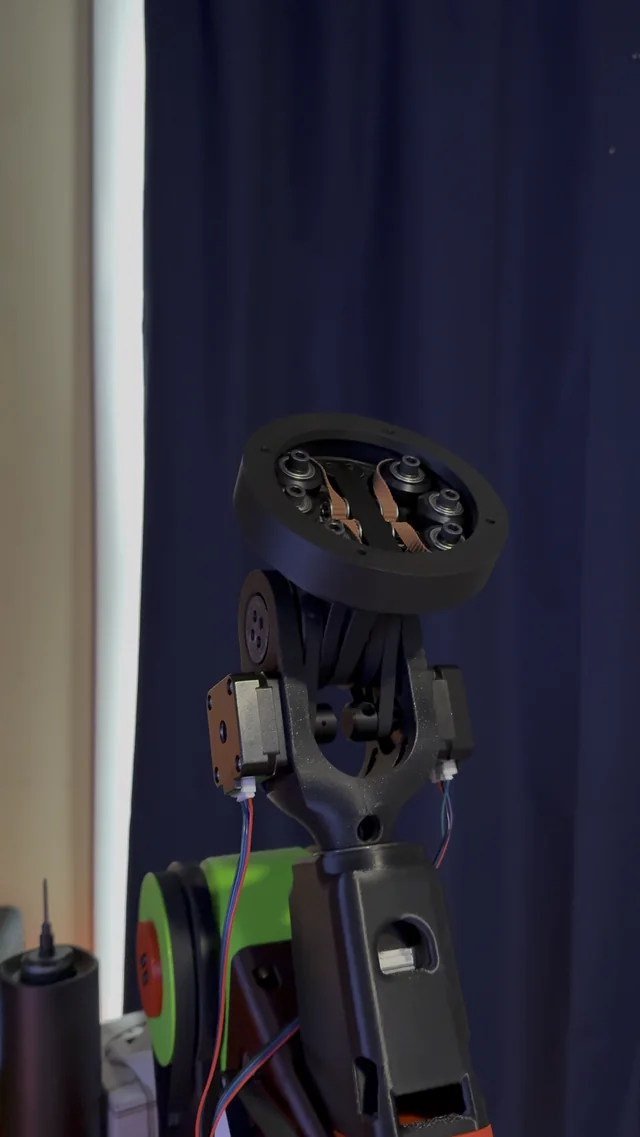
I put together a small ROS 2 subsystem that turns a 2-DOF pan/tilt platform and a cheap 2D LiDAR into a stop-and-capture 3D scanner, and figured it might be useful to someone else here. The setup: two Feetech STS3215 serial-bus servos aim an LDROBOT LD19. A node sweeps the platform and an assembler stacks the 2D scans into a `PointCloud2` using the live TF tree. There's an optional MQTT bridge so an external controller (in my case a microcontroller mission queue on a rover) can trigger scans and get a completion handshake back. It's a *complete* project — it even includes a fix to the LiDAR driver (upstream `ldlidar_stl_ros2` won't build on recent GCC/glibc; the patched fork is linked below). It talks to the rover over a well-defined set of MQTT messages, but every command also has an equivalent ROS 2 topic, so if you want a pure ROS 2 setup you just don't launch the bridge. (Personally I love the MQTT side — it lets me drive the whole thing from a tablet.) No vendor SDK — the Feetech STS/SMS half-duplex protocol is implemented directly over pyserial, including handling the URT-1 adapter's habit of echoing every TX byte back on the RX line (the kind of thing that eats an evening if you don't know it's coming). The assembler is driver-agnostic: it consumes standard `sensor_msgs/LaserScan` on `/scan`, so any conformant 2D LiDAR should work. It's running on an RK3588 today and is built to go headless on a Pi 5. This is the first piece I'm open-sourcing from a larger autonomous rover project, GPL-3.0. I'd genuinely welcome feedback — particularly from anyone who's done multi-LiDAR or TF-timing work, since the scan-to-TF synchronization was the fussiest part to get right. But it does work! Happy to answer questions about any of it. Project: https://github.com/aa2mz/pan\_tilt\_lidar Patched LiDAR driver: https://github.com/aa2mz/ldlidar\_stl\_ros2 submitted by /u/CorrectAir8833 [link] [Kommentare]


At Foxglove, we collaborated with Aditya Kamath, resulting in another blog post in his ROS 2 LeKiwi series, this time covering the integration of SLAM and Nav2. This blog post should be relevant to anyone wanting to integrate Nav2, even if they don't have a holonomic platform. If you find this kind of content useful, let us know, and we will keep it coming! submitted by /u/arewegoing [link] [Kommentare]

Nature: Outplaying elite table tennis players with an autonomous robot (Published: 22 April 2026): https://www.nature.com/articles/s41586-026-10338-5 YouTube Sony AI: Ace vs. Kihara | Pro Match Highlights | Sony AI Table Tennis Robot: https://www.youtube.com/watch?v=TwkDm2H6ft8 From 链上小财女 on 𝕏: https://x.com/Zoozo2025/status/2064998917394374930 submitted by /u/Nunki08 [link] [Kommentare]

I had a first go, putting together some of our friends in the space + a bit of research. It’s inspiring to see this vertical grow while everyone complains Europe is dead in tech. You do not need to live in SF or Shenzen to build with robots. You just need good engineers and a high tolerance for pain. There is lot of heavy metal waiting to wake up in Europe. Cyberwave Mirai Robotics Alto Robotics Fluid Wire Robotics Caracol AM ANYbotics Niulinx NEURA Robotics Generative Bionics Pipein Wearable Robotics Enchanted Tools Flybotix Quantum Systems Wandercraft Voliro Exotec Automata Agreenculture Reactive Robotics Verne EasyMile Inbolt https://preview.redd.it/i1ivxo1r1t6h1.png?width=2220&format=png&auto=webp&s=b49920fd224ce5e23121d673f33a78aa8174cecd Who’s missing? Feel free to tag your venture in the comments. Also: I’ll put the link to the database in the comments if anyone wants to contribute to the map and then I’ll happily publish a v2 🫡 Rough visual made with Claude Code can’t wait to see more logos on it. submitted by /u/Erlapso [link] [Kommentare]

One of our great triumphs and economic advantages is fading away

Hello you fine Internet folks, today we have an interview with Kira Boyko, the Product Director of Intel Xeon 6+.
A supervisor LLM plans. A worker ships code. State lives in markdown. One static Go binary.

A compile-cache key can fail two ways: too specific (needless recompiles) or too loose (wrong artifacts). How kache v0.5.0 corrects both, and what it does about inputs the compiler can never see.
Transform any GitHub repository into a modern, high-converting landing page automatically for free. Explore popular projects and deploy yours in 2 minutes.

Anthropic walked back Fable 5's silent-degradation guardrail in about a day. Why a visible boundary is the trust currency for capable AI agents.