
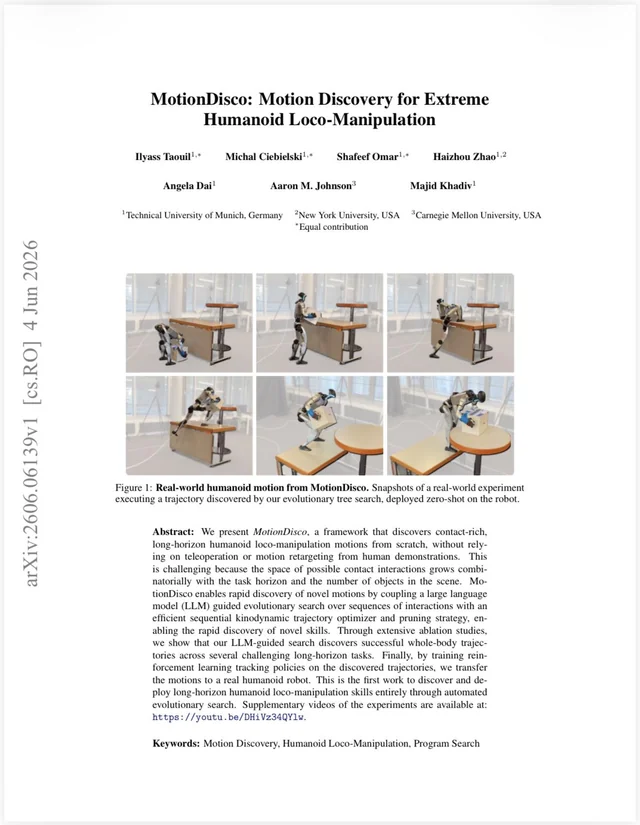
https://arxiv.org/abs/2606.06139 https://youtu.be/DHiVz34QYlw We present MotionDisco, a framework that discovers contact-rich, long-horizon humanoid loco-manipulation motions from scratch, without relying on teleoperation or motion retargeting from human demonstrations. This is challenging because the space of possible contact interactions grows combinatorially with the task horizon and the number of objects in the scene. submitted by /u/Worldly_Evidence9113 [link] [Kommentare]
Hey everyone, hope this is okay to post here. My co-author and I are currently between institutional affiliations, which means we don't have the academic email arXiv needs for an endorsement. We're hoping to find someone in cs.CV willing to take a quick look at our paper and endorse it if it meets your bar. The project: Locate-SAM2 We built a training-free pipeline connecting NVIDIA's LocateAnything-3B to Meta's SAM 2.1 through a lightweight adapter. The question we wanted to answer was simple: in a modular text-to-mask pipeline where everything is frozen, does the choice of grounder actually matter for the final mask? A few specifics, since the details are what tell you we're not just generating noise: On RefCOCO val, our system reaches 0.772 mIoU versus 0.717 for Grounding DINO Base, using the same SAM 2.1 backend throughout. RefCOCO appears in LocateAnything's training data, so we frame this honestly as in-domain benchmarking, not zero-shot transfer. We're not pretending otherwise. The paper has controlled comparisons across RefCOCO/+/g, adapter ablations, a ground-truth box oracle, a failure taxonomy, and a nonsense-prompt probe showing the pipeline needs abstention logic. Code is on GitHub and the paper is close to submission-ready. What we're hoping for Mainly an endorsement: someone to read the draft and, if they think it holds up, endorse us on arXiv. We'd acknowledge it and that's the whole ask. If anyone wants to get more involved, we're open to expanding the experiments or pointing the paper at a specific venue, and we'd talk co-authorship based on real contribution. We also have separate work in progress in physically-constrained DL, geospatial AI, and AI governance, in case any of that overlaps with what you do. We're not looking for a blind voucher. Drop a comment or a DM and we'll share the PDF and the repo. Happy to answer questions, and thanks for reading. submitted by /u/j_root_ [link] [Kommentare]

Hello, I am a 19-year-old dropout developing robots. I started with servo motors and have finally built a quadruped robot using the BLDC + FOC method. I have adopted a 20:1 backdriving reduction system. Currently, I am printing with PLA for testing purposes, and I plan to build it later using Pa12 or a more reinforced material. Also, are there any companies interested in spon1soring me? My development 💸 have run low😢😢, Please feel free to message me! My IG: IMAKEROBOTS__ submitted by /u/p0tato___ [link] [Kommentare]
I work as a surgical positioning specialist in an OR. Every day, my job is to make sure patients are positioned correctly during surgery. Wrong positioning = nerve damage, pressure necrosis, joint stress. Even then – the human body can compensate. It regenerates blood flow, heals tissue, adapts. A household robot can’t do any of that. Think about it like a motorcycle or a car: • Store your bike wrong over winter → flat tires, dry seals, dead battery • Wrong tire pressure for months → uneven wear, handling issues • A robot stored or „parked” incorrectly → joint stress, cable fatigue, sensor drift, premature wear Household robots like NEO, Tesla Optimus or LG CLOiD are coming to our homes within the next 2–3 years. They’ll cost $10,000–$20,000+. Nobody is talking about how to store, position and maintain them correctly at home. That’s the gap I’m here to fill – applying 2+ years of OR knowledge to household robotics. Question for the community: Would you trust a $20,000 robot to just „stand in the corner” without thinking about positioning and wear? submitted by /u/Commercial_Towel_352 [link] [Kommentare]

@Disneyディズニー「オラフ」がAIロボットになって登場 GTC展示ホールで見せた“キャラクターAIの生命感”

自ら起き上がる“AIバイク” ヤマハ「MOTOROiD:Λ」が示す新境地 Yamaha's "MOTOROiD:Λ" AI bike that stands up on its own【ロボスタ】倒れても起き上がる異形のバイク型AIロボット「モトロイド ラムダ」、ヤマハ発が描く「AIと走り、共に育つ未来」とはht...

Another week of robotics marketing loops versus harsh field realities. In this week's breakdown, we are looking past investor decks to audit the actual friction of automating physical labor. Here is what we are covering in this episode: Figure’s 55/Week Ramp-Up: Production is accelerating, but commercial use cases are still in continuous development. Is scaling ahead of general application a massive capital gamble, or does their package-sorting livestream prove they're ready for structured work? Verobotics at NVIDIA Campus: A massive 100,000 sq ft facade deployment that ended up in a strict 60/40 operational compromise with human window washing crews because of live construction site dust. The 8.1B Parameter Bottleneck: Looking at RLWRLD’s new RLDX-1 model. Why graph optimization and real-time memory bandwidth constraints—not raw compute power—are the real bottlenecks for dexterous robotic hands. Spot's Purely Visual Blind Spots: Boston Dynamics paired Spot with DeepMind’s Gemini 1.6. What a sideways-crushed soda can proves about semantic reasoning models running without tactile force integration. FANUC x Google: Industrial giants bringing physical AI to factory floors, but keeping implementation highly conservative. submitted by /u/ButterscotchTiny1114 [link] [Kommentare]
Has anyone received IROS results? The results are supposed to be out next week but I see my submission status currently changed to undisclosed, which, as far as I know, this happens usually at the day of sending out the notification. Any idea? Did anyone get any notification? submitted by /u/Street_Night_4344 [link] [Kommentare]

I read and collected Arxiv whitepapers starting after the launch of ChatGPT. I copied and pasted excerpts into Word to track them. Then migrated to Obsidian. That vault of some 1700 papers is now online. I figured it was time to see if others would find the collection useful. My whitepapers were organized into some 90 categories, all of which emerged from paper topics. New categories became necessary with the discussion of new methods, techniques, models etc. If I wanted to write about a topic, I'd upload an md file containing research excerpts on that topic to ChatGPT. This worked to a degree but maxxed out context pretty quickly. And I always had related research in multiple categories, according to how the research was framed. (Personas research in Aligment, Psychology, HCI, etc). So I used a plugin to create topic notes that built in and outbound wikilinks across the papers centered on shared concepts. When I ported this all online I added another layer of synthesis: Inquiring Lines as I call them. These cover cross-cutting, tension-surfacing, synthesizing, and frontier-opening research frames. There's 6,000 of them in my collection. Each is a page to itself that's a useful description of a research line of inquiry. These now also have prompts you can run yourself that will find related (and more recent) research - (I can't adequately maintain each topic with new research). It's all at https://inquiringlines.com/inquiring-lines/ if you want to poke around. As is everything in the age of AI, it's a work in progress. But there's a lot of rich material in there. Have a look. submitted by /u/Barton5877 [link] [Kommentare]
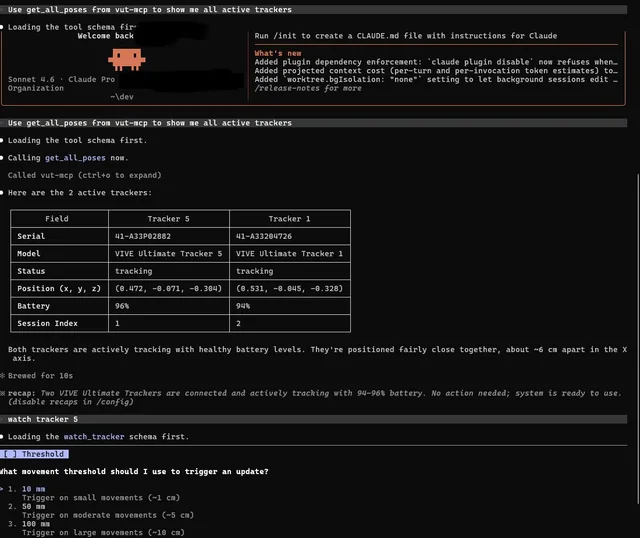
First-time poster here. I wanted to share a side project I’ve been working on that may be useful for robotics / research workflows. I built a headless toolkit for VIVE Trackers, which supports VIVE Tracker 3.0, Vive wands and VIVE Ultimate Trackers (SLAM). It streams live pose data over WebSocket, so tracker position / rotation can be used by other applications without needing a HMD. Tool kit also includes an MCP server, so the tracker data can be fed directly into agentic workflows / AI tools. GitHub: https://github.com/nandunabey/VT-Headless-SDK Disclaimer: I do work for VIVE, but this is not an official HTC / VIVE project. This is just a personal side project I built mainly to support a few research groups and to explore what’s possible. I come from more of a Product background than a developer background, so feedback, suggestions would be very welcome. submitted by /u/nadsblabla [link] [Kommentare]

Been building Olaf, a companion robot, in the open for a while now and just closed out the phase focused entirely on making him expressive instead of just functional. Sharing the demo + what changed: Voice: swapped Cartesia for Google TTS — noticeably more expressive and natural. Head motion: tuned so movement tracks the words and tone of speech rather than firing randomly. Ears: redesigned the ear movement — surprisingly big impact on how readable his "mood" is. Heart: added a small display on the body that renders a beating heart. Multilingual: he can switch languages mid-conversation (in the demo he answers in Hindi). Still tuning the audio side. That's the expression engine done bar some fine-tuning. Next phase is the body — getting him mobile so he can move around the apartment. Everything's open source if you want to dig in. Would appreciate a star: Hardware: https://github.com/kamalkantsingh10/OLAF Voice agent / pipeline: https://github.com/kamalkantsingh10/olaf_companion Happy to answer anything about the build. Feedback very welcome — especially on the motion-to-speech syncing: right now I'm driving head/ear motion off the LLM output, and I'd love to hear how others have approached tying gesture to prosody. submitted by /u/KamalSingh10 [link] [Kommentare]
Hi, I am a PhD student and trying to run a ML reading group focused on interpretability and robustness every weekend. Its always nice to hear different takes and opinions on a paper and this discussion group could serve the purpose. If you are a fellow PhD student or a ML researcher interested in reading recent papers in depth then please fill this google form to be added in the group for receiving further updates on when we can meet and discuss: https://docs.google.com/forms/d/e/1FAIpQLSdNg4x60lUHV7YW_kKPFlpPR3Rom_rOovbryD8YtOGQR8x0Kw/viewform submitted by /u/Ok_Access_9159 [link] [Kommentare]