 R
↗
R
↗
What if Playmobil figures were scaled up and equipped with AI, turning them into physical AI companions? It could be fun if their hands kept the classic C shape design but were upgraded with 3or 4 degrees of articulation, allowing them to perform simple tasks. (such as fetching a pen, making tea or coffee, and other basic household activities) The face could be a display screen. When powered off, it would show the classic Playmobil eyes and smile. Once activated, it would come to life with expressive eyes and facial animations similar to the characters in , allowing it to move and interact more naturally. What do you think? submitted by /u/Difficult-Limit-7551 [link] [Kommentare]
 R
↗
R
↗
https://preview.redd.it/p5ml1bjytm6h1.png?width=2126&format=png&auto=webp&s=337217b73e76a7c3628cdaf62f5867fb25fb3e0b This robotic piano tutor physically guides your fingers so you can play even if you've never touched a piano before. Instead of just watching videos or apps, this system uses a dual-arm gantry with five-finger robotic hands that: - Precisely control each finger’s position and pressure on the keys - Use compliant (flexible) actuators for natural-feeling guidance instead of stiff pushing - Start with strong support and gradually reduce assistance as you build real muscle memory It turns passive learning into active, embodied practice — helping you feel the correct movements directly. Video: https://www.youtube.com/watch?v=QXn7hCM5yTI submitted by /u/Different-Humor-241 [link] [Kommentare]
R
↗
Hello, I am trying to get back into the Robotics industry after years as an SWE and find a job. I am based in Chicago so I was thinking of getting an all access pass to network for a job, and take some courses. I am currently unemployed. Does anyone know the best way to network at these things? Are the courses worth it? Does anyone have a coupon to reduce the cost? i would be paying out of pocket and I am unemployed so i figured i would ask. Thanks for your advice! submitted by /u/RickAmes [link] [Kommentare]
 R
↗
R
↗
ex-Huggingface pre-training team just announce a new library create for robotics data refinment! It supports ingestion of all robotics formats (Parquet, HDF5, MCAP, Zarr, RLDS, and LeRobot), as well as the common processing flows like visual hand-tracking, subtask annotations and reward model running submitted by /u/Other_Housing8453 [link] [Kommentare]
 R
↗
R
↗
 R
↗
R
↗
Is this N20 D-shaft wheel good for a line follower robot that needs to climb a 20° ramp and pass over small debris(kinda like RoboCup rescue line jr)? submitted by /u/trashzin__ [link] [Kommentare]
 R
↗
R
↗
I designed and made a fully open-source mobile robotics platform for my robot arm, making it a whole robotics manipulator platform. The arm has 5 degrees of freedom, and the platform is 4WD with differential steering. The plan is to upgrade to mecanum wheels in the future. Current electronics are an NXP FRDM board controlling everything over WiFi, with an L298N Motor driver for the platform and off-the-shelf servo motors by DFROBOT. The idea was to use components that are easily available and easy to use! The plan is to continue working on it and upgrading it! submitted by /u/milosrasic98 [link] [Kommentare]
R
↗
Hey everyone! I teach CS and programming at a small school in Syria and I'm in the middle of designing a full 5-year hardware-focused IT curriculum. I'd love some honest feedback from people with hands-on robotics/embedded systems experience. Here's the current plan: - **Grade 7:** Lego Spike Prime + Micro:bit - **Grade 8:** Arduino Uno with multiple sensors - **Grade 9:** Project-based learning with Arduino *(see note below)* - **Grade 10:** ESP32 - **Grade 11:** Advanced ESP32 + Raspberry Pi **Note on Grade 9:** This is the Basic Education Certificate year (think national standardized exams), so the curriculum here is intentionally lighter — more of a consolidation year with small projects rather than introducing heavy new concepts. Students won't have the bandwidth for anything too demanding, so I'm keeping it Arduino-based but project-driven to keep them engaged without piling on. --- **My questions for the community:** **Is this hardware progression age-appropriate?** Students range from roughly 12–17. Does the jump between stages feel right, or are there places where it's too much too soon (or not enough)? **ESP32 in grades 10–11 — good idea or not?** I like it because it covers WiFi/BLE, has plenty of GPIO, and feels like a natural step up from Arduino. But I've heard mixed things about its learning curve and toolchain complexity for high schoolers. What's been your experience? **Are there better alternatives to the ESP32 at that level?** I'm open to suggestions — whether that's staying on the Arduino ecosystem (Nano 33 IoT, Portenta, Uno R4 ?), or something else entirely. Budget is a consideration but not the only one. Any feedback appreciated — curriculum design resources, pitfalls to avoid, or even just "this worked great for my students" stories. Thanks in advance! submitted by /u/Pastalini_Byte [link] [Kommentare]
R
↗
Hi everyone, I recently completed my Bachelor's degree in Mechatronics and Robotics Engineering, and I'm currently focusing on improving my ROS 2 skills. I'm looking for individuals, teams, or communities that are actively working with ROS 2 and would be open to having a beginner- or intermediate-level member join them. My goal is to gain practical experience, contribute to projects, learn best practices, and develop my robotics software skills. If you know of any ROS 2 groups, open-source projects, Discord servers, study groups, or communities where I can learn and collaborate, I would greatly appreciate your recommendations. I'm motivated to learn, willing to put in the work, and eager to contribute wherever I can. Thank you in advance. submitted by /u/Maleficent_Youth_168 [link] [Kommentare]
 R
↗
R
↗
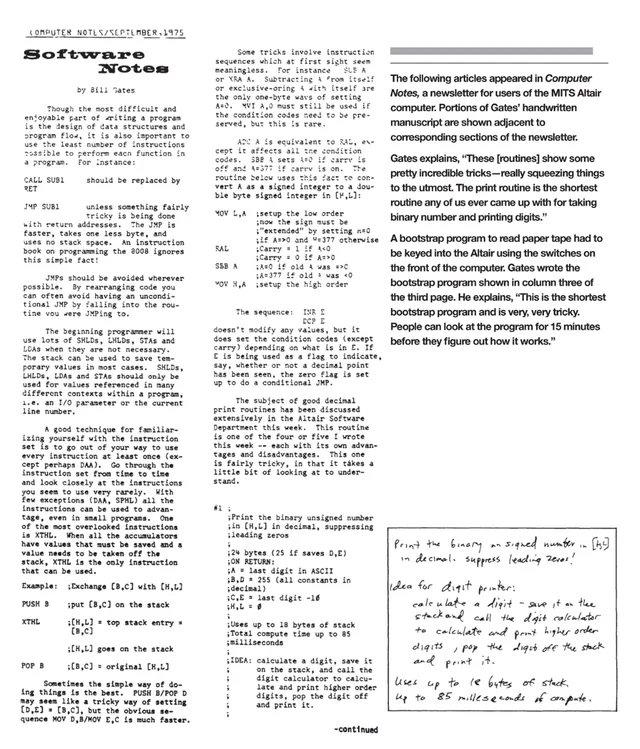
Here you can see how Bill Gates thought about memory: In this Software Notes newsletter from 1975, he explains the strategies and tricks he employs to squeeze things to the utmost. Back then, "memory budgeting" wasn't just a best practice, it was a survival skill. What are your approaches today? You can see more how Gates approaches systems design, handwritten diagrams, and BASIC source code here : https://www.programmersatwork.net/bill-gates submitted by /u/slammers00 [link] [Kommentare]
 R
↗
R
↗
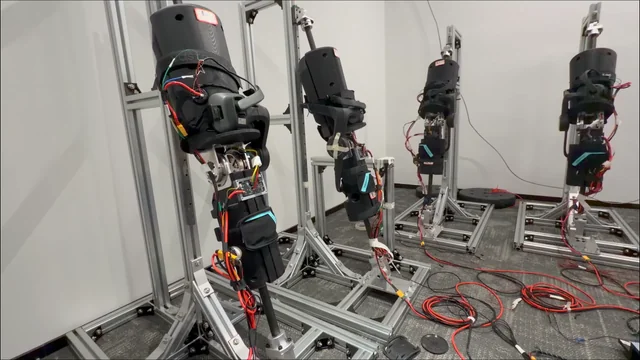
Hey everyone, Daniel here, we’re building Vastnaut One, a 4x4 exoskeleton designed for people moving through demanding terrain with load where fatigue tends to build gradually across hips and knees, especially on descents. What you’re looking at here is part of our joint aging tests, repeating the same movement cycles than any normal hike would require. At some point, it stops looking like testing and starts looking a bit obsessive. Our system works across both hips and knees in real time step by step based on movement, terrain, and load. The goal isn’t to change how you move, but to redistribute effort over time so the later miles feel closer to the first. Curious how others here think about for a wearable like this, and what do you usually trust as a good enough cycle count. submitted by /u/dan1elfeng [link] [Kommentare]
R
↗
Hey everyone, I just completed my first year in Electronics and Computer Engineering and I’m currently working on a robotic arm project. I already have the STEP files, datasheets, and most of the components finalized. The issue I’m facing is with the actual mechanical CAD/design part in Fusion 360 — mainly assembling the arm properly, joint design, motor mounting, bearing placement, alignment, etc. I’ve tried using AI tools like ChatGPT and Claude for guidance, but for complex robotics CAD they often give incorrect Fusion 360 steps or impractical mechanical solutions. I’m looking for someone who has experience with: - robotic arm design - mechanical CAD - Fusion 360 - robotics assemblies Even some guidance, feedback, or help with a few parts of the design would really help me move forward. I can share a ZIP file containing all the STEP files and datasheets if anyone is interested. Unfortunately I can’t pay right now since I’m still a student, but I’m genuinely trying to learn and build this project seriously. You can DM me or contact me at: deepkukreja31@gmail.com submitted by /u/Life_Transition3270 [link] [Kommentare]
 R
↗
R
↗
Andrew Barry of Generalist compares earlier robot behaviors, including Spot opening doors, with the newer learned-model approach being used for dexterous manipulation. The older approach relied on hard-coded controllers for different parts of a task. The newer approach is aimed at giving the model a wider range of usable behavior when it sees something outside the exact training case. Barry describes this as “improvisational intelligence,” where the robot encounters a new variation and still takes a reasonable action instead of immediately failing. He also connects this to how humans complete manipulation tasks. A person does not need to make every pick or motion perfectly on the first try. They can miss, adjust, regrasp, and continue the task. submitted by /u/Responsible-Grass452 [link] [Kommentare]
 R
↗
R
↗
 R
↗
R
↗