Hey everyone, I'm deep into robotics simulation, specifically focusing on Reinforcement Learning (RL) and Deep Learning (DL) workflows. My hardware setup is an M4 MacBook Air (16GB unified memory). Initially, I wanted to use NVIDIA Isaac Sim/Isaac Lab because of its photorealistic graphics, advanced sensor simulation, and massive parallelized RL support. However, since Isaac Sim relies heavily on NVIDIA RTX hardware and CUDA, running it locally on Apple Silicon isn't feasible. I really want a local development environment rather than constantly relying on cloud instances. I need a simulation software that satisfies these core requirements: High-Quality Graphics: Clean rendering, realistic physics-based lighting, and solid sensor noise modeling for computer vision/DL perception models. Robust RL/DL Support: Seamless integration with Python ML ecosystems (like PyTorch, Stable-Baselines3, or JAX), OpenAI Gym/Gymnasium wrappers, and fast parallel simulation stepping. Apple Silicon friendly: Runs natively or optimized on macOS, making good use of the M4 chip and unified memory architecture without hitting x86_64 or CUDA bottlenecks. What are the best alternatives for this exact setup? I’ve looked into MuJoCo (especially with its native macOS build and the JAX-based MuJoCo XLA / MJX for acceleration, though I'm curious how well XLA handles Apple Silicon for parallel envs). I've also considered Unity with ML-Agents, which utilizes Apple's Metal API for incredible graphics and handles RL workflows beautifully on Mac. Has anyone successfully built a high-graphics RL/DL robotics pipeline on an M4 Mac? Which simulator did you choose, and what did your Python bridge look like? submitted by /u/Risheyyy [link] [Kommentare]
https://reddit.com/link/1u0rx4y/video/yhckg2drz56h1/player Sick of writing custom parsers every time I switch tactile sensors. Threw this together — one API, any sensor, 3 lines. Video shows the useful thing: demo: AI pre-annotate → review → export. Took me like 2 minutes. pip install tlabel import tlabel tlabel.demo() # try it right now, zero config Works with GelSight Mini, DIGIT, PaXini, Daimon. MIT, free. submitted by /u/ImmediateArm7942 [link] [Kommentare]

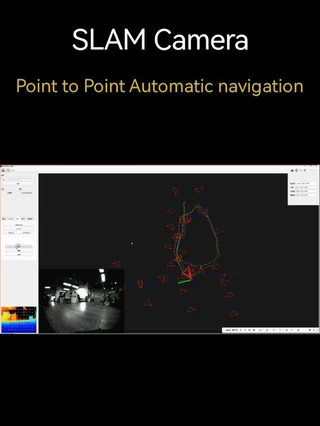
I've recently completed the assembly of a SunFounder PiCar-X and am currently running it on a legacy Raspberry Pi B. I have the base movement and motor control working and am currently prepping to get it chasing ArUco/AprilTags this coming week. I'm looking to evolve this platform into something capable of SLAM and eventually Structure from Motion (SfM). I'd love to get some community advice on the best way to handle these upgrades: Traction The stock wheels are quite slippery. Has anyone found direct-fit replacement tires or wheels that offer better grip on smooth indoor surfaces? Odometry Since the stock motors lack encoders, my dead reckoning is non-existent. Should I attempt to mount external encoders to these motors, or is it better to swap out the motor/gearbox assembly entirely for something with integrated feedback? IMU for SLAM I'm planning to add an accelerometer/gyroscope. Any specific sensors (such as the BNO055 vs. MPU6050) that are currently considered the "gold standard" for stability and ease of integration on a Raspberry Pi? Computer Vision The current camera resolution is limiting for SfM. Any recommendations for a higher-resolution CSI or USB camera that fits well within the PiCar's chassis? ROS 2 / Distributed Computing A specific question on the software side: I'm planning to move this platform to ROS 2. Given that I'm working with a legacy Raspberry Pi B, is this a lost cause, or should I keep the Pi as a low-level hardware node and offload the heavy ROS 2 processing, SLAM, and visualization tasks to a more powerful machine on my network? If a distributed setup is the preferred approach, what does the typical workflow look like? For example: Pi handles motor control, sensors, and camera acquisition ROS 2 nodes run on a desktop/laptop workstation Visualization and mapping performed via RViz on the workstation Communication over Wi-Fi using DDS Is this the recommended architecture, or are there better approaches for a platform like the PiCar-X? General Advice Any feedback on the hardware upgrade path, software architecture, or general "gotchas" with this kit would be greatly appreciated. Thanks in advance! submitted by /u/okineedaplan [link] [Kommentare]
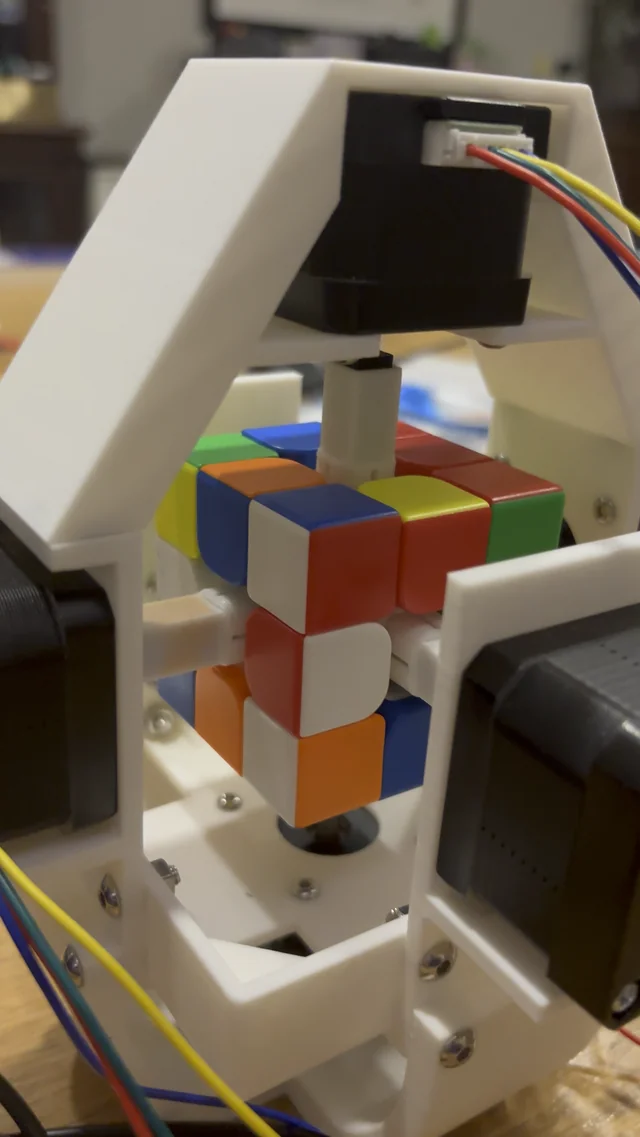
This machine takes around four seconds for each solve. To reach that speed I had to use the kociemba algorithm, which can find a solution of around 20 moves for all scrambles. It took me a really long time to complete this so I would appreciate it if you show it some love! I made this when I was around 15. Please ask questions! submitted by /u/Henry517 [link] [Kommentare]
TL;DR struggling in finding a meaningful research contribution on top of existing big foundation models. (edit: please note it's my first post on reddit,I'm not a bot) Context: I'm working on FM applied to robotics: VLAs, world models, WAMs. Lately I'm mostly reading papers, and implementing small adds on. Those topic are really exiting but I’m wondering where modest researchers (like me) can make meaningful contributions, given that training competitive foundation models from scratch is a big-lab game. For people working on fondation models in academy and R&D, that asked themself similar questions: Do you have some honest suggestions or feedback? If starting from a pretrained fondation model, main things that come to my mind are eg: - architecture changes (don't you lose all the pre training warmup)? - fine tune (not much new science if one runs lora...) - froze the model and build add-on like uncertaintyquant , world-model lookahead, inference guidance, safety constraints - something big I'm not seeing? Also happy to hear paper/project recommendations that are good examples of this. Thank you all. submitted by /u/Amazing-Coat5160 [link] [Kommentare]

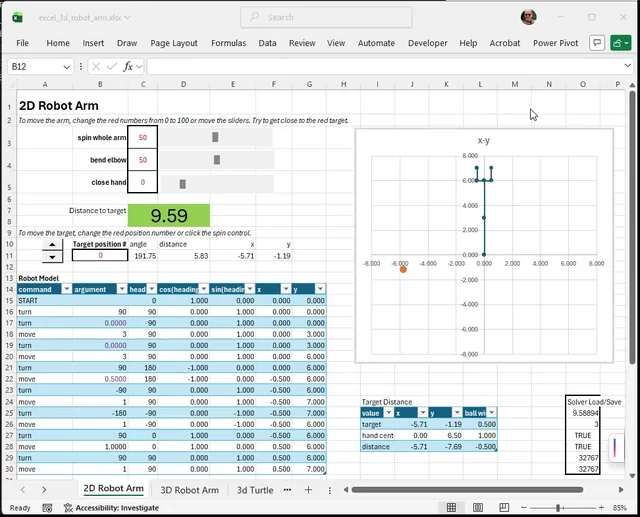
I made a playable Excel workbook that models a 2D and 3D robot arm using only ordinary spreadsheet formulas, charts, sliders, and Excel Solver. The idea is to make kinematics easier to understand. GitHub: https://github.com/CarlKCarlK/excel-3d-robot-arm The 3D arm is inspired by the old Radio Shack / TOMY Armatron toy robot arm. The workbook lets you move the arm manually, set a target point, and then use Excel's Solver to find the control settings that move the hand to the target (inverse kinematics!). I made this mostly as a learning project. Excel makes the math visible: the rotation matrices, position updates, target error, and Solver setup are all inspectable cell by cell. Nothing is hidden in a robotics library or graphics engine. The model itself is just a series of rows, each controlling one segment. The rows process 3 ways to turn (yaw, pitch, roll) or a move, turtle graphics-style. submitted by /u/carlk22 [link] [Kommentare]

Hey reddit, So we built a gaming accessibility app SensePilot that enable people with disabilities to control a computer and play video games. I just finished developing the human-robot interface prototype so thought I'll share the demo here too as its related to robotics. Hope to eventually apply this to assistive living robots, because their controls are usually very limited and their users are unable to use hands for controlling the robot very well. submitted by /u/SensePilot [link] [Kommentare]
I'm looking to buy a robot arm through AIFITLAB - has anyone done a major purchase through them recently? I'm looking to buy an AgileX NERO, price seems lower than US based companies which I know might be due to tariffs submitted by /u/Vassaci [link] [Kommentare]
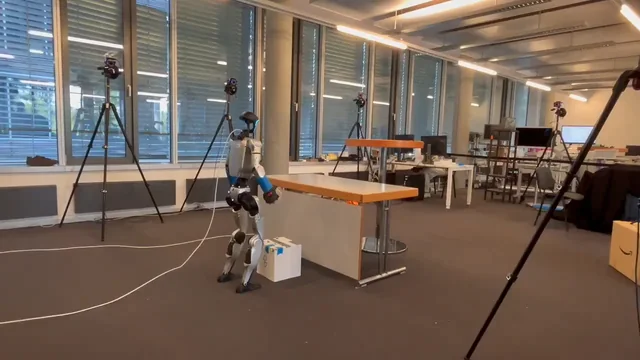
From C. Zhang on 𝕏: https://x.com/ChongZzZhang/status/2062837883178738107 Project: MotionDisco: Motion Discovery for Extreme Humanoid Loco-Manipulation Website: https://atarilab.github.io/motiondisco.io/ ArXiv: https://arxiv.org/pdf/2606.06139 submitted by /u/Nunki08 [link] [Kommentare]

During NY Techweek, Arc League, presented by Katena, demonstrated the teleoperated suit with robot boxing and dancing. I know there has been a lot of humanoid hype, but as a roboticist watching it up close, I'm still quite amazed how far we have come. submitted by /u/OkThought8642 [link] [Kommentare]
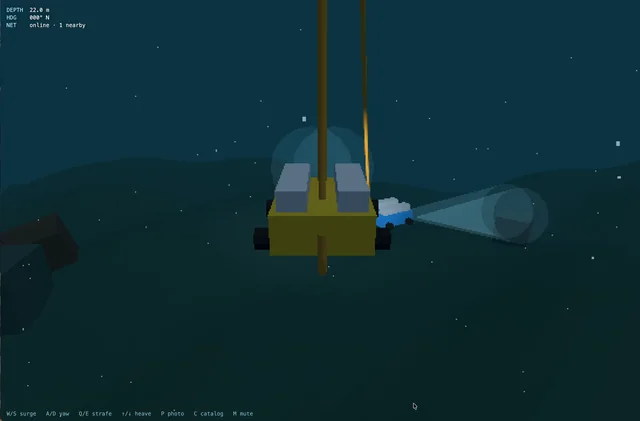
I made a little online multiplayer game inspired by my recent underwater robotics work. You can pilot a little ROV around the ocean, explore shipwrecks, take photos and categorize fish and things. It's multiplayer and I'm thinking of having treasure hunts, etc. Should I ship it? Would you play? submitted by /u/cheese_birder [link] [Kommentare]