Channels
I'm researching how teams build datasets for robot learning and I'm curious what the biggest challenges are in practice. From what I've seen so far, collecting robotics data seems very different from standard computer vision datasets because you have to deal with sensor synchronization, demonstrations, real-world edge cases, and often much smaller datasets. One thing I'm still trying to understand is where most teams spend the majority of their time. For people working on robot learning, manipulation, navigation, or autonomous systems: Is data collection the main bottleneck? Is annotation and labeling the difficult part? Do you rely more on simulation or real-world data? What would you improve if you could rebuild your data pipeline from scratch? I'd love to hear some real-world experiences. submitted by /u/Vane1st [link] [Kommentare]

Leaning towards uncanny valley obviously versus trying to make it sound too real but I like getting roasted by a robot. Current progress . Hopefully doesn’t get flagged for having fire in the background or something. Cheers yall! submitted by /u/TheRealFanger [link] [Kommentare]

In my previous post was a little showcase of my implementation of the pure pursuit path tracking algorithm for omni-directional robots. One of the missing features is the safe curve approaching. The robot doesn't know the upcoming curve and it won't slow down (enough, at least in the previous implementation). Now I added the feed-forward lookahead that will calculate the slowdown cost based on the total sum of the angle differences of every three pose points in a small set of lookahead points. And the slowdown cost then plugged into the e^-x function and used it to scale the maximum velocity. Now it seems that the robot approaches the curve more smoothly. Additional stuff still needs to be added such as the acceleration limit and the better last pose point brake. If you are interested, you can check it out here over GitHub : https://github.com/E12-CO/iRob_bot_ros2 submitted by /u/TinLethax [link] [Kommentare]
Just came across this turn key modular consumer robotic arm that offers hardware and software integration all in one package. Question: Does anything like this exists for industrial application under $5k, each module made out of stainless steel or aluminum and comes with easy to use software integration (machine vision etc)? submitted by /u/innomind [link] [Kommentare]

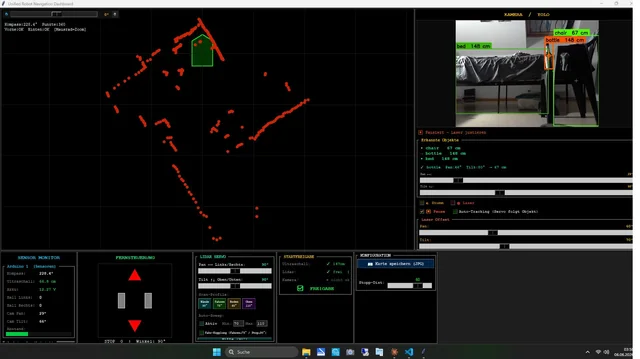
Posting an update here with simplified PCB and robustness. Mighty Camera runs VIO on-device in a tiny package. But for it to be useful, you need things like mapping (and later occupancy, loop closure etc). Here is a demo of lightweight mapping which uses VIO pose from Mighty and generates a semi-dense map on host-side in realtime. It’s early but this will be part of the SDK along with other goodies. submitted by /u/twokiloballs [link] [Kommentare]
Hi all, I’m trying to understand how people working with physical AI, embodied AI, robotics, or VLA models think about benchmarks in practice. This is not a product promotion or a request for upvotes. I’m looking for practical perspectives from people who run, read, or rely on benchmark results. A few questions: - Which benchmarks do you actually pay attention to? - Do benchmark scores influence model, policy, or framework choices, or are they mostly sanity checks? - What makes a benchmark result credible to you? - How much do you trust simulated task results compared with real-robot or hardware-in-the-loop results? - What are the biggest red flags when you see a physical AI benchmark claim? I’m especially interested in how people separate useful evidence from leaderboard noise, overfitting, cherry-picked demos, or unclear evaluation protocols. If this is too broad for this subreddit, I’m happy to narrow the question. submitted by /u/Confident_Gas_5266 [link] [Kommentare]