 R
↗
R
↗
Andrew Barry of Generalist compares earlier robot behaviors, including Spot opening doors, with the newer learned-model approach being used for dexterous manipulation. The older approach relied on hard-coded controllers for different parts of a task. The newer approach is aimed at giving the model a wider range of usable behavior when it sees something outside the exact training case. Barry describes this as “improvisational intelligence,” where the robot encounters a new variation and still takes a reasonable action instead of immediately failing. He also connects this to how humans complete manipulation tasks. A person does not need to make every pick or motion perfectly on the first try. They can miss, adjust, regrasp, and continue the task. submitted by /u/Responsible-Grass452 [link] [Kommentare]
 R
↗
R
↗
Just a quick demo to see how fast my hand is! I started with a baseline 5 second, finger-to-thumb opposition cycle and increased the speed until the fingers started to lose contact. The pinky starts to lose contact with the thumb at around 12x and the rest of the fingers barely make contact at 14x and beyond. Having the fingers be tendon driven does help a good bit in reducing inertia to get these max achievable speeds. Although, I'm not sure there's even a good reason to be moving this fast.. submitted by /u/qualitygui [link] [Kommentare]
R
↗
I have been planning this for a while now. It's basically a youtube live stream where we learn robotics concepts together, ask each other doubts, discuss, make weird robots, some shinaneigens and most importantly just have fun. You can choose to not show your face, or vtube like me. Right now I have started learning the physics behind robotics using a book called Modern robotics by Kevin lynch and Frank Park. You can either learn it with me(I have only seen a couple of pages, I can teach you in like 20 min to get you to where I am) or if you want you can choose to just do your own thing simultaneously as well. Any suggestions or feedback to get as many people as we can is appreciated 👍 I really want to make the robotics community to become friendly and fun . Just dm me . we'll plan exactly how to undertake this (let's say a discord call in the stream or chat based etc.) submitted by /u/SundeepKuPanigrahi [link] [Kommentare]
 R
↗
R
↗
Honestly, I don't know how other people can do IMU balancing so elegantly; my PID oscillates like it's on life support. I have been tuning the PID the whole night, but then again, I don't have a lot of experience other than following some manuals, so any advice would be great! I am using BNO055 for IMU. Work in progress GitHub: https://github.com/SphericalCowww/CubicDoggo_06R Original Cubic Doggo: https://github.com/SphericalCowww/CubicDoggo submitted by /u/SphericalCowww [link] [Kommentare]
R
↗
Just a machine that made you stop and think: "wow...somebody put a ridiculous amount of engineering into this". Could be anything.sometimes the most impressive machines are the ones that make incredibly difficult things look effortless. submitted by /u/hannimalki [link] [Kommentare]
 R
↗
R
↗
I would love feedback on the data quality and the 3D renderings specifically, because the renderings were the hardest part about getting this to work. Basically, Chaveta is a agentic dataset curation tool that allows you to submit a prompt and instantly receive a dataset for: - World models - Robotics (JSON Trajectories) - LLM Fine Tuning - Geological - Synthetic Tool Calling / LLM flows - Time series For the robotics path, you can also download to MCAP or simple JSON and we have a render tab that allows you to edit joints visually + we provide copy/paste scripts for importing the dataset into things like Transformers. Let me know what you think. submitted by /u/ComradePampers [link] [Kommentare]
 R
↗
R
↗
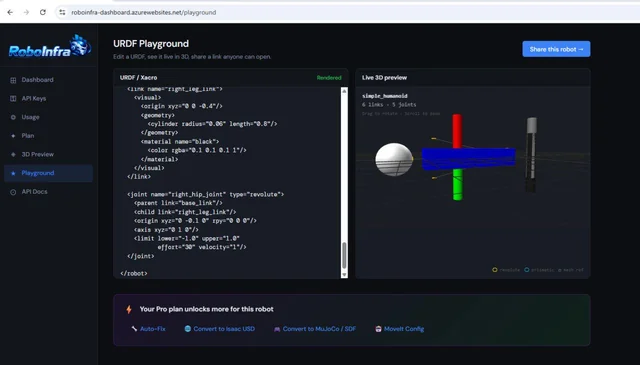
Hi everyone, I've been working on a browser-based URDF playground aimed at making robot development a bit easier. Steps: i) Paste URDF or Xacro directly into the browser ii) Instant 3D visualization iii) Shareable robot links iv) No ROS installation required Playground: https://roboinfra-dashboard.azurewebsites.net/playground Additional tooling: URDF/Xacro validation Auto-fix suggestions URDF → SDF conversion URDF → MJCF conversion URDF → USD conversion MoveIt configuration generation Mesh analysis GitHub Action integration Python SDK The goal is to make robotics workflows feel a little more like modern web development—open a browser, paste your robot description, and start iterating immediately. I'd really appreciate feedback from ROS, MoveIt, Isaac Sim, MuJoCo, and general robotics developers: What feature would make this genuinely useful in your workflow? What is currently missing from existing URDF tools? Any issues or suggestions after trying it? Thanks! submitted by /u/DateRealistic5066 [link] [Kommentare]





