Channels
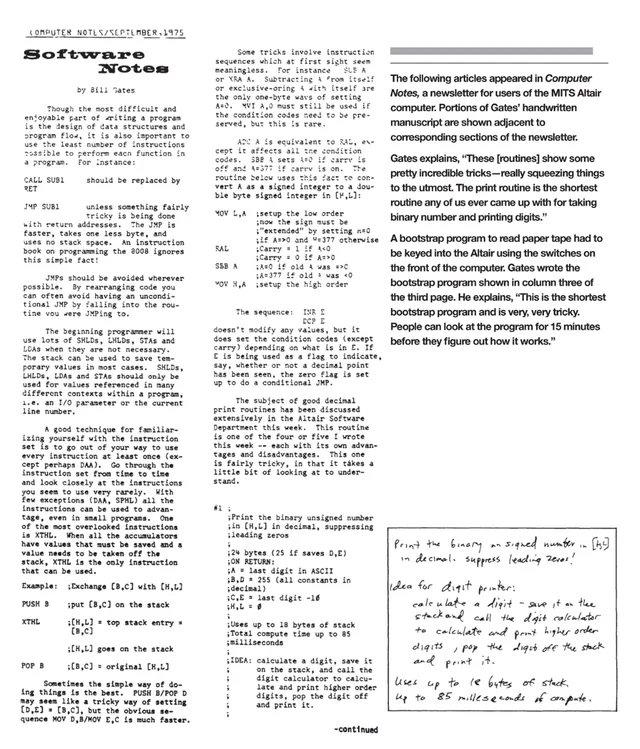
Here you can see how Bill Gates thought about memory: In this Software Notes newsletter from 1975, he explains the strategies and tricks he employs to squeeze things to the utmost. Back then, "memory budgeting" wasn't just a best practice, it was a survival skill. What are your approaches today? You can see more how Gates approaches systems design, handwritten diagrams, and BASIC source code here : https://www.programmersatwork.net/bill-gates submitted by /u/slammers00 [link] [Kommentare]
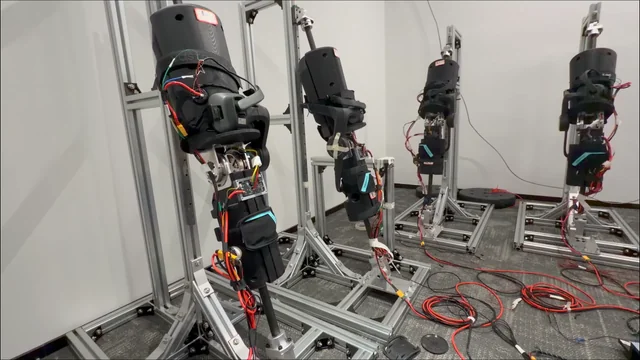
Hey everyone, Daniel here, we’re building Vastnaut One, a 4x4 exoskeleton designed for people moving through demanding terrain with load where fatigue tends to build gradually across hips and knees, especially on descents. What you’re looking at here is part of our joint aging tests, repeating the same movement cycles than any normal hike would require. At some point, it stops looking like testing and starts looking a bit obsessive. Our system works across both hips and knees in real time step by step based on movement, terrain, and load. The goal isn’t to change how you move, but to redistribute effort over time so the later miles feel closer to the first. Curious how others here think about for a wearable like this, and what do you usually trust as a good enough cycle count. submitted by /u/dan1elfeng [link] [Kommentare]
Hey everyone, I just completed my first year in Electronics and Computer Engineering and I’m currently working on a robotic arm project. I already have the STEP files, datasheets, and most of the components finalized. The issue I’m facing is with the actual mechanical CAD/design part in Fusion 360 — mainly assembling the arm properly, joint design, motor mounting, bearing placement, alignment, etc. I’ve tried using AI tools like ChatGPT and Claude for guidance, but for complex robotics CAD they often give incorrect Fusion 360 steps or impractical mechanical solutions. I’m looking for someone who has experience with: - robotic arm design - mechanical CAD - Fusion 360 - robotics assemblies Even some guidance, feedback, or help with a few parts of the design would really help me move forward. I can share a ZIP file containing all the STEP files and datasheets if anyone is interested. Unfortunately I can’t pay right now since I’m still a student, but I’m genuinely trying to learn and build this project seriously. You can DM me or contact me at: deepkukreja31@gmail.com submitted by /u/Life_Transition3270 [link] [Kommentare]

Andrew Barry of Generalist compares earlier robot behaviors, including Spot opening doors, with the newer learned-model approach being used for dexterous manipulation. The older approach relied on hard-coded controllers for different parts of a task. The newer approach is aimed at giving the model a wider range of usable behavior when it sees something outside the exact training case. Barry describes this as “improvisational intelligence,” where the robot encounters a new variation and still takes a reasonable action instead of immediately failing. He also connects this to how humans complete manipulation tasks. A person does not need to make every pick or motion perfectly on the first try. They can miss, adjust, regrasp, and continue the task. submitted by /u/Responsible-Grass452 [link] [Kommentare]




Just a quick demo to see how fast my hand is! I started with a baseline 5 second, finger-to-thumb opposition cycle and increased the speed until the fingers started to lose contact. The pinky starts to lose contact with the thumb at around 12x and the rest of the fingers barely make contact at 14x and beyond. Having the fingers be tendon driven does help a good bit in reducing inertia to get these max achievable speeds. Although, I'm not sure there's even a good reason to be moving this fast.. submitted by /u/qualitygui [link] [Kommentare]


Designing CLIs when agents are the primary user

Australian SaaS platforms often need to know whether a business user is real, active, and correctly represented. ABN data can help verify business users by checking ABN status, GST registration, enti…

Mozilla has introduced support for Google’s Play Integrity API in Firefox for Android, which has raised concerns within the free and open-source software (FOSS) community. This API is notorious for preventing users of custom ROMs from accessing certain banking applications. The update involves the addition of a new library, lib-integrity-googleplay, that requests a Play Integrity […]
Proposed emoji that didn’t make the cut.
LMC, Inc. is considered the world's foremost authority on the adiabatic process. LMC builds turnkey press systems and supplies services for cutting, blanking and forming of metals through their APM Process Centers.