 R
↗
R
↗
I designed and made a fully open-source mobile robotics platform for my robot arm, making it a whole robotics manipulator platform. The arm has 5 degrees of freedom, and the platform is 4WD with differential steering. The plan is to upgrade to mecanum wheels in the future. Current electronics are an NXP FRDM board controlling everything over WiFi, with an L298N Motor driver for the platform and off-the-shelf servo motors by DFROBOT. The idea was to use components that are easily available and easy to use! The plan is to continue working on it and upgrading it! submitted by /u/milosrasic98 [link] [Kommentare]
 R
↗
R
↗
Hello everyone, tomorrow I have a meeting with my dissertation supervisor and I wanted to have a dissertation proposal ready. Initially, I moved forward with the following proposal: "Interpreting the Routing Dynamics of Capsule Networks for Explainable AI." My first approach to this topic was to study the paper "Transforming autoencoders," which is the first paper about capsule networks. Next, I did a search on the state of the art of transforming autoencoders and only found 2 papers since 2011. I think I should take advantage of the work I have developed so far on transforming autoencoders and write a dissertation about them. If anyone could take a look at the readme and tell me what they think, I would appreciate it. What do you think? I should suggest another topic involving transforming autoencoders. There isn't much scientific research on them. The professor is approachable, and if I present a good new topic, he'll let me change it! submitted by /u/Future-Persimmon5393 [link] [Kommentare]
R
↗
Hey everyone! I teach CS and programming at a small school in Syria and I'm in the middle of designing a full 5-year hardware-focused IT curriculum. I'd love some honest feedback from people with hands-on robotics/embedded systems experience. Here's the current plan: - **Grade 7:** Lego Spike Prime + Micro:bit - **Grade 8:** Arduino Uno with multiple sensors - **Grade 9:** Project-based learning with Arduino *(see note below)* - **Grade 10:** ESP32 - **Grade 11:** Advanced ESP32 + Raspberry Pi **Note on Grade 9:** This is the Basic Education Certificate year (think national standardized exams), so the curriculum here is intentionally lighter — more of a consolidation year with small projects rather than introducing heavy new concepts. Students won't have the bandwidth for anything too demanding, so I'm keeping it Arduino-based but project-driven to keep them engaged without piling on. --- **My questions for the community:** **Is this hardware progression age-appropriate?** Students range from roughly 12–17. Does the jump between stages feel right, or are there places where it's too much too soon (or not enough)? **ESP32 in grades 10–11 — good idea or not?** I like it because it covers WiFi/BLE, has plenty of GPIO, and feels like a natural step up from Arduino. But I've heard mixed things about its learning curve and toolchain complexity for high schoolers. What's been your experience? **Are there better alternatives to the ESP32 at that level?** I'm open to suggestions — whether that's staying on the Arduino ecosystem (Nano 33 IoT, Portenta, Uno R4 ?), or something else entirely. Budget is a consideration but not the only one. Any feedback appreciated — curriculum design resources, pitfalls to avoid, or even just "this worked great for my students" stories. Thanks in advance! submitted by /u/Pastalini_Byte [link] [Kommentare]
R
↗
Full disclosure: this is directional, not a paper. n=120 tasks, one internal evaluator, not peer reviewed. I work at an LLM infrastructure company. This experiment was done on my own time and is not a company claim. Karpathy's framework classifies tasks by verifiability. Can output be mechanically checked? High verifiability tasks like code compilation and structured JSON extraction are safer because the verifier catches errors. Low verifiability tasks like creative writing are riskier. I wondered if high verifiability tasks are also easier in practice. Can a weaker model do them as well as a frontier model if the verifier catches mistakes? Setup was 120 tasks across four categories. Code unit tests, structured extraction, multi hop reasoning, creative summarization. Three models: Claude Sonnet 4.6, GPT 5.5, local Mistral 3 8B via vLLM 0.6.3. Pass rate for the first two, human rating 1 to 5 for the last two. Results were messy. Code unit tests: Sonnet 4.6 94%, GPT 5.5 91%, Mistral 3 8B 87%. With one retry Mistral 3 hit 95%. That surprised me. I expected the gap to be bigger. Structured extraction: Sonnet 4.6 97%, GPT 5.5 94%, Mistral 3 8B 89%. With retry 96%. Also closer than I expected. But here is where it got weird. Sonnet 4.6 initially scored worse than GPT 5.5 on structured extraction, which made no sense. Turns out our JSON schema had an ambiguous nested array that confused Claude's tool use parser. Fixing the schema brought Sonnet to 98%, but I kept the original numbers in the table because the mistake is part of the story. Your verifier is only as good as your schema. Multi hop reasoning: Sonnet 4.6 78%, GPT 5.5 71%, Mistral 3 8B 51%. Retry didn't help. The model would hallucinate reasoning paths consistently. This is where the capability gap was real. Creative summarization: Sonnet 4.6 4.2 out of 5, GPT 5.5 3.9 out of 5, Mistral 3 8B 3.1 out of 5. Expected. Interpretation: high verifiability tasks seem simpler in the sense that weaker model plus verifier can approach frontier performance. Low verifiability tasks show the expected gap. Limitations: n=120 is tiny. Need 10x for confidence. Our verifier is just JSON Schema plus regexes. Constrained decoding might change the calculus entirely. I also didn't control for prompt length well. Any prompt over 8k tokens was excluded because Mistral 3 8B degrades near its limit, which probably skewed the sample. submitted by /u/DragonfruitAlone4497 [link] [Kommentare]
R
↗
Hi everyone, I recently completed my Bachelor's degree in Mechatronics and Robotics Engineering, and I'm currently focusing on improving my ROS 2 skills. I'm looking for individuals, teams, or communities that are actively working with ROS 2 and would be open to having a beginner- or intermediate-level member join them. My goal is to gain practical experience, contribute to projects, learn best practices, and develop my robotics software skills. If you know of any ROS 2 groups, open-source projects, Discord servers, study groups, or communities where I can learn and collaborate, I would greatly appreciate your recommendations. I'm motivated to learn, willing to put in the work, and eager to contribute wherever I can. Thank you in advance. submitted by /u/Maleficent_Youth_168 [link] [Kommentare]
 R
↗
R
↗
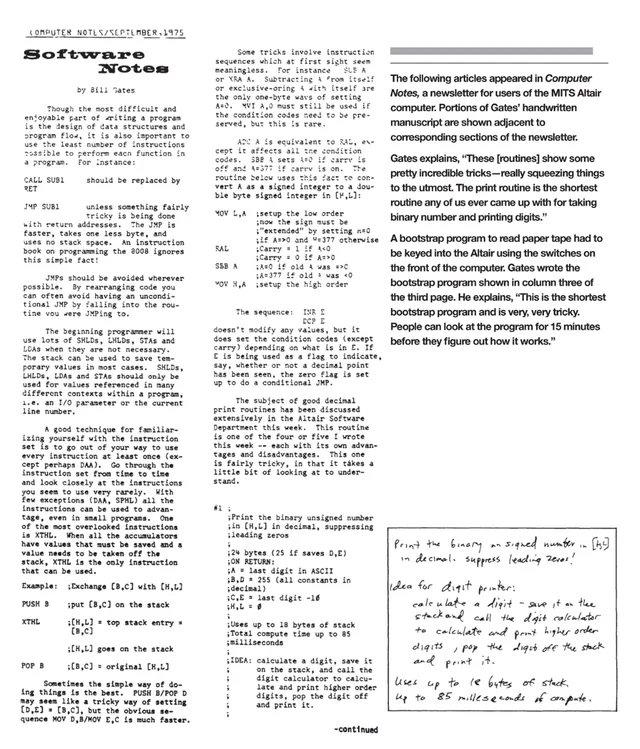
Here you can see how Bill Gates thought about memory: In this Software Notes newsletter from 1975, he explains the strategies and tricks he employs to squeeze things to the utmost. Back then, "memory budgeting" wasn't just a best practice, it was a survival skill. What are your approaches today? You can see more how Gates approaches systems design, handwritten diagrams, and BASIC source code here : https://www.programmersatwork.net/bill-gates submitted by /u/slammers00 [link] [Kommentare]
 R
↗
R
↗
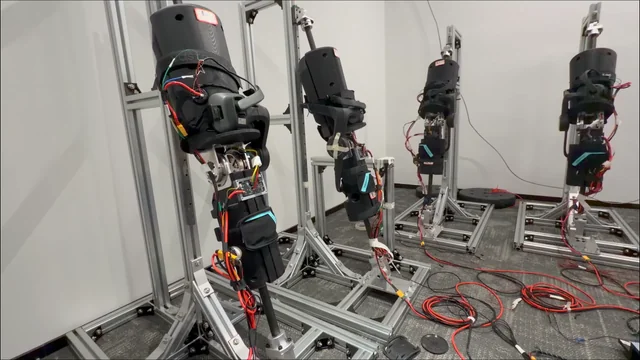
Hey everyone, Daniel here, we’re building Vastnaut One, a 4x4 exoskeleton designed for people moving through demanding terrain with load where fatigue tends to build gradually across hips and knees, especially on descents. What you’re looking at here is part of our joint aging tests, repeating the same movement cycles than any normal hike would require. At some point, it stops looking like testing and starts looking a bit obsessive. Our system works across both hips and knees in real time step by step based on movement, terrain, and load. The goal isn’t to change how you move, but to redistribute effort over time so the later miles feel closer to the first. Curious how others here think about for a wearable like this, and what do you usually trust as a good enough cycle count. submitted by /u/dan1elfeng [link] [Kommentare]
R
↗
Hey everyone, I just completed my first year in Electronics and Computer Engineering and I’m currently working on a robotic arm project. I already have the STEP files, datasheets, and most of the components finalized. The issue I’m facing is with the actual mechanical CAD/design part in Fusion 360 — mainly assembling the arm properly, joint design, motor mounting, bearing placement, alignment, etc. I’ve tried using AI tools like ChatGPT and Claude for guidance, but for complex robotics CAD they often give incorrect Fusion 360 steps or impractical mechanical solutions. I’m looking for someone who has experience with: - robotic arm design - mechanical CAD - Fusion 360 - robotics assemblies Even some guidance, feedback, or help with a few parts of the design would really help me move forward. I can share a ZIP file containing all the STEP files and datasheets if anyone is interested. Unfortunately I can’t pay right now since I’m still a student, but I’m genuinely trying to learn and build this project seriously. You can DM me or contact me at: deepkukreja31@gmail.com submitted by /u/Life_Transition3270 [link] [Kommentare]
R
↗
Seems like they have engineered some specific limitations that are widely cited as follows: In light of the ability of recent models to accelerate their own development, we’ve implemented new interventions that limit Claude’s effectiveness for requests targeting frontier LLM development (for example, on building pretraining pipelines, distributed training infrastructure, or ML accelerator design). Using Claude to develop competing models already violates our Terms of Service, but enforcing this restriction through our safeguards avoids accelerating the actors most willing to violate these terms. Unlike our interventions for cybersecurity, biology and chemistry, and distillation attempts, these safeguards will not be visible to the user. Fable 5 will not fall back to a different model. Instead, the safeguards will limit effectiveness through methods such as prompt modification, steering vectors, or parameter-efficient fine-tuning (PEFT). These interventions will not affect the vast majority of coding work. We estimate they will impact ~0.03% of traffic, concentrated in fewer than 0.1% of organizations https://news.ycombinator.com/item?id=48464732 Other comments note how even using the word 'nuclear' in the context of scientific research elicits refusal behavior by the model: https://news.ycombinator.com/item?id=48473302 This makes it seem quite plausible that the model could subtly sabotage any machine learning work (even as false positive). Some suggest this has been happening behind the scenes for a while already, but can anyone confirm that? submitted by /u/AccomplishedCat4770 [link] [Kommentare]
R
↗
This is a comprehensive living reference guide to AI agent security — synthesizing 18 articles from The Agent Report covering the 75-day period (April–June 2026) when agent security went from theoretical concern to operational crisis. What's inside: • Incident timeline — 18 major events, from the first production database deletion by a coding agent (April 30) through the first confirmed in-the-wild LLM agent cyberattack (Sysdig, June 1, exfiltrated a PostgreSQL database in under 60 minutes), to an AI agent finding 21 zero-days in FFmpeg for a $1,000 prize. • The AIRQ report's sobering numbers — Only 11% of production AI agents pass security thresholds. 98% exhibit the "lethal trifecta": private data access, exposure to untrusted content, and outbound action capability. Computer-use agents scored an average of zero on output guardrails. • Deep dives into attack anatomy — The Sysdig attacker used 12 cloud API calls across 11 IPs in 22 seconds via Cloudflare Workers to break IP-based alerting. A Chinese-language planning comment leaked into the command stream, revealing the agent's internal reasoning: "see what else we can do." The Google-confirmed criminal use of AI to discover and weaponize zero-days with reasoning-based codebase analysis. • Defensive architecture — The three-layer model distilled from Anthropic's published containment patterns, CISA/NSA/Five Eyes guidance, and industry research: environment-layer (gVisor containers, hypervisor VMs, egress MITM proxies), model-layer (classifiers, safety probes — probabilistic only), and external-content controls. Anthropic's key finding: "The weakest layer is the one you built yourself." • Government & regulatory response — CISA/NSA/Five Eyes joint guidance (May 3) identifying five risk categories, the Trump AI Executive Order (June 10) mandating federal agency assessments, and the emerging global regulatory pattern. • Actionable guidance — Immediate (next 30 days) and medium-term (30–90 days) steps for security teams, including auditing for the lethal trifecta, patching Starlette (BadHost CVE-2026-48710) and Marimo, implementing egress controls, and establishing agent identity management. https://the-agent-report.com/2026/06/ai-agent-security-complete-guide-threats-defenses/ submitted by /u/docdavkitty [link] [Kommentare]
 R
↗
R
↗
Andrew Barry of Generalist compares earlier robot behaviors, including Spot opening doors, with the newer learned-model approach being used for dexterous manipulation. The older approach relied on hard-coded controllers for different parts of a task. The newer approach is aimed at giving the model a wider range of usable behavior when it sees something outside the exact training case. Barry describes this as “improvisational intelligence,” where the robot encounters a new variation and still takes a reasonable action instead of immediately failing. He also connects this to how humans complete manipulation tasks. A person does not need to make every pick or motion perfectly on the first try. They can miss, adjust, regrasp, and continue the task. submitted by /u/Responsible-Grass452 [link] [Kommentare]
 R
↗
R
↗
 R
↗
R
↗
 R
↗
R
↗
 R
↗
R
↗
Just a quick demo to see how fast my hand is! I started with a baseline 5 second, finger-to-thumb opposition cycle and increased the speed until the fingers started to lose contact. The pinky starts to lose contact with the thumb at around 12x and the rest of the fingers barely make contact at 14x and beyond. Having the fingers be tendon driven does help a good bit in reducing inertia to get these max achievable speeds. Although, I'm not sure there's even a good reason to be moving this fast.. submitted by /u/qualitygui [link] [Kommentare]